
بی ثباتی راه رفتن در ماشین لباسشویی
معرفی
ناپایداری راه رفتن، به دلیل توزیع غیریکنواخت لباس ها، یک مشکل رایج در ماشین لباسشویی های قابل حمل سبک وزن است. این مشکل در ماشینهای لباسشویی محور افقی که به دلیل کارایی بالا با وجود هزینه ساخت بالا از محبوبیت بیشتری برخوردار هستند، بیشتر است.
این مدل یک مدل ساده شده از یک ماشین لباسشویی قابل حمل محور افقی را شبیه سازی می کند و شروع ناپایداری راه رفتن را در طول چرخه چرخش پیش بینی می کند. یک روش متعادل کننده فعال مبتنی بر کنترل نیز برای از بین بردن ناپایداری و ارتعاشات موجود در سیستم اجرا شده است.
تعاریف مدل
در مورد بی ثباتی
ناپایداری به دلیل وجود یک جرم لباسشویی نامتعادل در حین چرخش رخ می دهد. نیروی گریز از مرکز قابل توجهی توسط توده لباسشویی نامتعادل در حال چرخش ایجاد می شود که تمایل دارد دستگاه را بی ثبات کند. این مشکل ناپایداری با اضافه کردن وزن اضافی به دستگاه حل می شد. امروزه راه های بهتری برای تثبیت سیستم وجود دارد.
این ناپایداری می تواند منجر به لغزش انتقالی، لغزش چرخشی یا نوک شود. می توان ثابت کرد که سرعت بحرانی لغزش انتقالی قریب الوقوع بالاتر از لغزش چرخشی است. از این رو این مدل ناپایداری چرخشی را تحلیل می کند.
مفروضات مدلسازی
چندین فرض برای ساده سازی مدل وجود دارد:
• | درام و واشر سفت فرض می شوند. |
• | درام به واشر نصب می شود به طوری که تنها حرکت نسبی چرخش حول محور درام است. |
• | دور درام درام ثابت و به اندازه کافی زیاد است به طوری که جرم لباسشویی در اثر نیروهای گریز از مرکز با همان سرعت درام می چرخد. |
• | دستگاه در تماس با کف باقی می ماند که به این معنی است که نوک مجاز نیست. |
• | اصطکاک بین واشر و زمین با استفاده از مدل اصطکاک کولن با ضریب اصطکاک ثابت مدلسازی میشود. |
هندسه
هندسه مدلسازیشده، متشکل از مجموعهای از واشر، درام، شکاف و جرم متعادل کننده، که در شکل 1 نشان داده شده است .
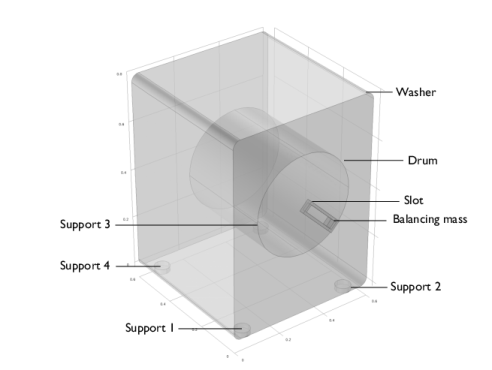
شکل 1: هندسه مدل شده ماشین لباسشویی.
در حالت ایده آل، جرم متعادل کننده باید در دو طرف جلو و عقب درام قرار گیرد تا عدم تعادل لحظه ای به حداقل برسد. با این حال، برای سهولت مدلسازی، آن را فقط در سمت جلوی درام مدلسازی میکنند، اما مختصات y مرکز جرم آن به گونهای تغییر میکند که با درام منطبق باشد.
درام و شکاف در مقایسه با جرم واشر جرم ناچیزی دارند، اما درام جرم لباسهای نامتعادل را اضافه میکند.
اتصالات
درام از طریق یک مفصل لولا به واشر متصل می شود. درام و شکاف نیز از طریق یک مفصل لولا به هم متصل می شوند. این مفصل برای بالانس فعال مورد نیاز است و زمانی که تعادلی در سیستم وجود ندارد قفل می شود. در صورت بالانس فعال، سرعت زاویه ای اصلاحی روی این مفصل اعمال می شود.
شکاف و جرم متعادل کننده از طریق یک مفصل منشوری به هم متصل می شوند. این مفصل برای تعادل فعال نیز مورد نیاز است. البته در این مدل استفاده نشده و همیشه قفل است.
واشر دارای چهار تکیه گاه به زمین است که با اتصالات مسطح مدل شده اند. این اتصالات مسطح دارای خاصیت ارتجاعی هستند به طوری که علیرغم اینکه واشر (یک بدنه صلب) در چهار مکان مختلف به زمین متصل است، می توان نیروهای اتصال را به طور مستقل بر روی تمام اتصالات محاسبه کرد.
حاشیه لغزش
حاشیه لغزش معیاری برای ثبات است و راه رفتن زمانی رخ می دهد که به صفر برسد. به عنوان تفاوت بین حداکثر نیروی اصطکاک ممکن و نیروی اصطکاک واقعی تعریف می شود.
حاشیه لغزش برای تمام تکیه گاه های دستگاه تعریف شده است و زمانی که حداقل سه یا هر چهار تکیه گاه حاشیه لغزش صفر داشته باشند، دستگاه در واقع می لغزد. حاشیه لغزش تابعی از سرعت زاویه ای درام است و از این رو سرعت عملیاتی بحرانی را برای جلوگیری از شروع به راه رفتن ماشین تعیین می کند.
در عمل، سیستم متعادل کننده فعال باید زمانی فعال شود که این حاشیه لغزش نزدیک به صفر باشد. در این مدل سرعت زاویه ای درام مشخص است و با گذشت زمان به صورت خطی افزایش می یابد و سیستم متعادل کننده در زمان مشخصی فعال می شود.
مکانیسم کنترل برای تعادل فعال
علت عدم تعادل، نیروی گریز از مرکز نامتعادل خالص بر روی لباس های در حال چرخش است. اگر نیرویی برابر و مخالف اعمال شود، ارتعاشات را می توان از بین برد. این را می توان با کمک یک توده متعادل کننده به دست آورد. به طور کلی جرم و موقعیت لباس های نامتعادل پیشینی مشخص نیست و جرم جرم متعادل کننده ثابت است. بنابراین موقعیت زاویه ای و شعاعی جرم متعادل کننده باید تنظیم شود تا نیروهای ایجاد شده توسط لباس های نامتعادل توسط جرم متعادل کننده متعادل شود.
مکانیسم کنترل برای متعادل سازی فعال دو نوع اصلاح را انجام می دهد:
• | تصحیح زاویه ای: چرخش مجموعه جرم متعادل کننده شکاف نسبت به درام. این برای اصلاح جهت نیروی گریز از مرکز ایجاد شده توسط جرم متعادل کننده است. |
• | تصحیح شعاعی: ترجمه جرم متعادل کننده در شکاف. این برای تصحیح بزرگی نیروی گریز از مرکز ایجاد شده توسط جرم متعادل کننده است. |
در این مدل پارامترها به گونه ای انتخاب می شوند که نیازی به اصلاح شعاعی نباشد و از این رو مدل سازی نشود. با این حال، مدل را می توان برای اجرای این اصلاح نیز گسترش داد.
تصحیح زاویه ای
کل عدم تعادل در صفحه xz در قاب چرخان را می توان به صورت زیر نوشت:
جایی که
• | m b جرم توده متعادل کننده است |
• | m cl جرم لباس نامتعادل است |
• | r b موقعیت شعاعی جرم متعادل کننده است |
• | r cl موقعیت شعاعی لباس نامتعادل است |
• | ω سرعت زاویه ای درام است |
• | φ 0 زاویه اولیه جرم متعادل کننده با محور افقی است |
• | β چرخش نسبی بین درام و شکاف است |
مقدار کل عدم تعادل و زاویه بین عدم تعادل کل و جرم متعادل کننده به صورت زیر است:
زاویه تصحیح را می توان به صورت زیر محاسبه کرد:
نتایج و بحث
شکل 2 چرخش واشر را در یک لحظه خاص برای یک سیستم بدون بالانس فعال نشان می دهد. در اینجا جابجایی با ضریب 100 برای تجسم بهتر مقیاس بندی می شود.
جهت و مقدار نیروی اصطکاک روی تمام تکیه گاه ها در یک لحظه خاص در شکل 3 قابل مشاهده است .
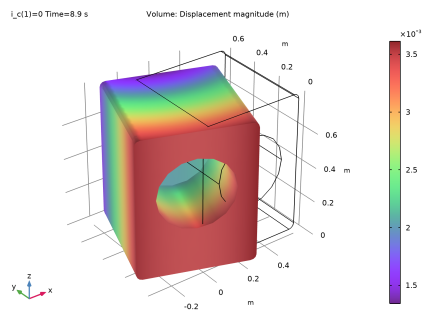
شکل 2: چرخش واشر برای یک سیستم بدون بالانس فعال (بزرگنمایی شده).
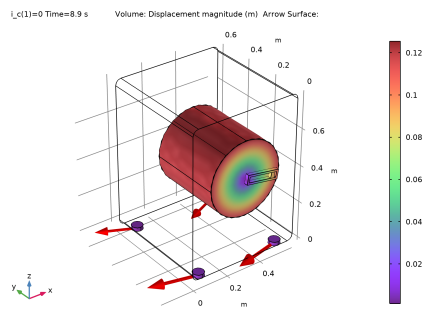
شکل 3: چرخش درام و نیروی اصطکاک در تکیه گاه های واشر برای یک سیستم بدون بالانس فعال.
شکل 4 عدم تعادل کل در قاب چرخان را نشان می دهد. عدم تعادل کل با افزایش سرعت زاویه ای درام افزایش می یابد. اثر تعادل فعال به وضوح قابل مشاهده است. به محض فعال شدن، عدم تعادل را به مقدار بسیار کمی کاهش می دهد. تغییر عدم تعادل کل در قاب ثابت در شکل 5 نشان داده شده است .
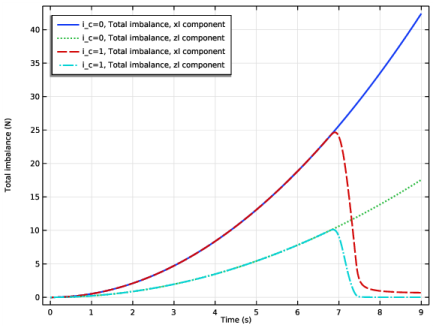
شکل 4: عدم تعادل کل در قاب چرخان.
تغییرات زمانی حاشیه لغزش برای ساپورت-1 (جلو) و ساپورت-3 (پشت) در شکل 6 نشان داده شده است . می توان مشاهده کرد که حاشیه لغزش در support-3 بیشتر از حمایت-1 است. این نشان می دهد که در این طراحی خاص، تکیه گاه جلویی احتمال لغزش بیشتری دارد.
حاشیه لغزش کل ماشین لباسشویی در شکل 7 قابل مشاهده است . حاشیه لغزش کل مجموع حاشیه های لغزش تک تک تکیه گاه ها است. در نمودار مشاهده می شود که حاشیه لغزش کل برای مدت زمان کوتاه صفر می شود که باعث لغزش ماشین لباسشویی می شود. در صورت تعادل فعال، به محض فعال شدن مکانیسم تعادل، حاشیه لغزش کل بهبود می یابد.
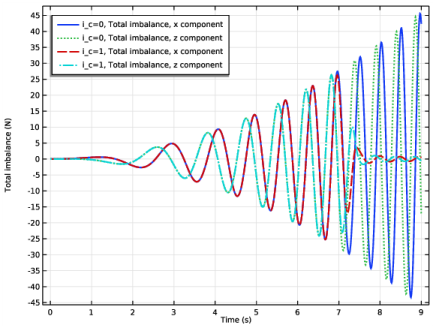
شکل 5: عدم تعادل کل در قاب ثابت.
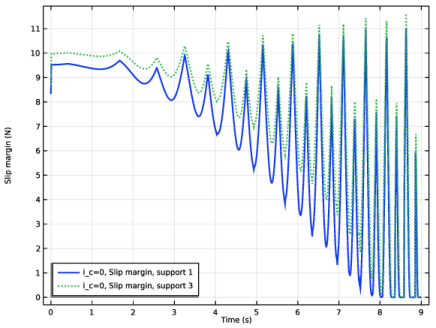
شکل 6: لغزش حاشیه های ساپورت-1 (جلو) و ساپورت-3 (پشت) برای یک سیستم بدون تعادل فعال.
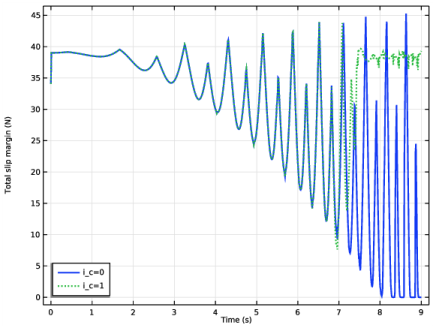
شکل 7: حاشیه لغزش کل ماشین لباسشویی.
چرخش واشر حول محور z در شکل 8 نشان داده شده است . این ناپایداری چرخشی را نشان می دهد که با گذشت زمان در حال توسعه است که پس از فعال شدن مکانیسم تعادل حذف می شود.
شکل 9 دور درام و موتور اصلاح را نشان می دهد. مشاهده می شود که موتور اصلاح کننده حدود 7 ثانیه شروع به کار می کند و به محض تثبیت سیستم متوقف می شود. زاویه اصلاح مورد نیاز برای تثبیت سیستم در شکل 10 نشان داده شده است .
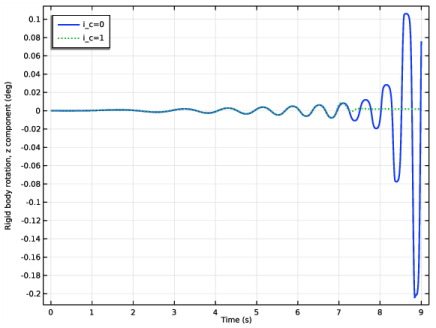
شکل 8: چرخش واشر حول محور عمودی.
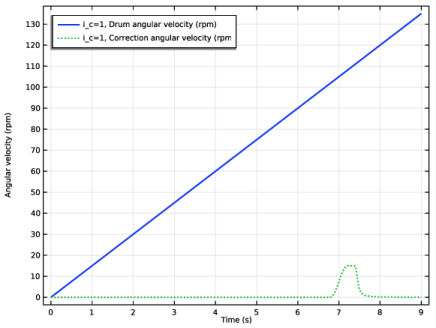
شکل 9: RPM درام و موتور اصلاح.
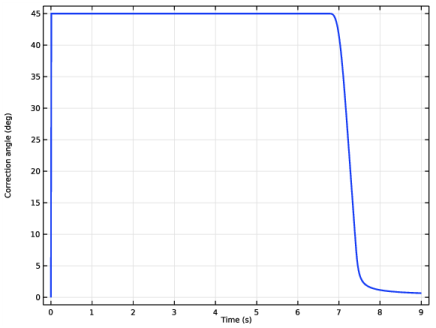
شکل 10: زاویه اصلاح مورد نیاز برای یک سیستم با تعادل فعال.
نکاتی درباره پیاده سازی COMSOL
• | زیرگره جرم و ممان اینرسی ماده صلب برای وارد کردن خصوصیات اینرسی داده شده در یک نقطه خاص استفاده می شود. |
• | اتصال بین واشر و زمین با استفاده از یک اتصال مسطح مدل سازی می شود . واشر سفت و سخت در چهار مکان با زمین در تماس است. برای اعمال اصطکاک بر روی این تکیه گاه ها، نیروهای مشترک باید شناخته شوند. برای محاسبه نیروهای اتصال و حذف محدودیتهای اضافی، اتصالات با فنر مصنوعی بالا و ضرایب میرایی الاستیک ساخته میشوند. |
• | اطلاعات مربوط به درجات آزادی سیستم و محدودیت های سیستم را می توان در بخش Rigid Body DOF Summary در گره فیزیک یافت. |
• | اتصالات تنظیم شده در مدل را می توان در قسمت Joints Summary گره فیزیک نیز بررسی کرد. |
منابع
1. E. Papadopoulos و I.Papadimitriou، “مدلسازی، طراحی و کنترل ماشین لباسشویی قابل حمل در طول چرخه چرخش،” کنفرانس بین المللی IEEE-ASME در سیستم های پیشرفته مکاترونیک هوشمند ، جلد. 2، صفحات 899-904، 2001.
مسیر کتابخانه برنامه: Multibody_Dynamics_Module/Machinery_and_Robotics/washing_machine_walk
دستورالعمل مدلسازی
از منوی File ، New را انتخاب کنید .
جدید
در پنجره جدید ، روی  Model Wizard کلیک کنید .
Model Wizard کلیک کنید .
مدل جادوگر
1 | در پنجره Model Wizard ، روی |
2 | در درخت Select Physics ، Structural Mechanics>Multibody Dynamics (mbd) را انتخاب کنید . |
3 | روی افزودن کلیک کنید . |
4 |
5 | در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
6 |
تعاریف جهانی
با وارد کردن پارامترهای مدل و هندسه شروع کنید.
پارامترهای 1
1 | در پنجره Model Builder ، در قسمت Global Definitions روی Parameters 1 کلیک کنید . |
2 | در پنجره تنظیمات برای پارامترها ، بخش پارامترها را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل washing_machine_walk_parameters.txt دوبار کلیک کنید . |
هندسه 1
واردات 1 (imp1)
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای واردات ، بخش واردات را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل washing_machine_walk.mphbin دوبار کلیک کنید . |
5 |
فرم اتحادیه (فین)
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Form Union (fin) کلیک کنید . |
2 | در پنجره تنظیمات Form Union/Assembly ، بخش Form Union/Assembly را پیدا کنید . |
3 | از لیست Action ، Form an assembly را انتخاب کنید . |
4 | تیک Create Pairs را پاک کنید . |
5 | در نوار ابزار Home ، روی |
6 |
7 |
MULTIBODY DYNAMICS (MBD)
مواد سفت و سخت: واشر
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Multibody Dynamics (mbd) راست کلیک کرده و Material Models>Rigid Material را انتخاب کنید . |
2 | در پنجره تنظیمات برای مواد سفت و سخت ، در قسمت نوشتار برچسب ، عبارت Rigid Material: Washer را تایپ کنید . |
3 | فقط دامنه های 1-3، 7 و 8 را انتخاب کنید. |
چگالی دامنه های سفت و سخت انتخاب شده را روی صفر قرار دهید. به جای آن از زیرگره Mass and Moment of Inertia برای تعیین جرم و مرکز جرم دامنه ها استفاده کنید .
4 | قسمت Density را پیدا کنید . از لیست ρ ، User defined را انتخاب کنید . |
جرم و لحظه اینرسی 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات جرم و لحظه اینرسی ، قسمت مرکز جرم را پیدا کنید . |
3 | از لیست، User defined را انتخاب کنید . |
4 | بردار X m را به صورت مشخص کنید |
xcx_w | ایکس |
xcy_w | y |
xcz_w | z |
5 | بخش جرم و لحظه اینرسی را پیدا کنید . در قسمت متن m ، m_w را تایپ کنید . |
از یک زیرگره نیروی کاربردی برای محاسبه نیروی گرانش استفاده کنید.
مواد سفت و سخت: واشر
در پنجره Model Builder ، روی Rigid Material: Washer کلیک کنید .
نیروی کاربردی 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای نیروی کاربردی ، بخش مکان را پیدا کنید . |
3 | از لیست، User defined را انتخاب کنید . |
4 | بردار X p را به عنوان مشخص کنید |
xcx_w | ایکس |
xcy_w | y |
xcz_w | z |
5 | قسمت Applied Force را پیدا کنید . بردار F را به صورت مشخص کنید |
0 | ایکس |
0 | y |
-m_w*g_const | z |
با تکثیر Rigid Material: Washer node قسمت های بیشتری از مجموعه ایجاد کنید .
مواد سفت و سخت: طبل
1 | روی Rigid Material: Washer کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای مواد سفت و سخت ، عبارت Rigid Material: Drum را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت انتخاب دامنه را پیدا کنید . روی Clear Selection کلیک کنید . |
4 | فقط دامنه 4 را انتخاب کنید. |
جرم و لحظه اینرسی 1
1 | در پنجره Model Builder ، Rigid Material: Drum node را گسترش دهید ، سپس روی Mass and Moment of Inertia 1 کلیک کنید . |
2 | در پنجره تنظیمات جرم و لحظه اینرسی ، قسمت مرکز جرم را پیدا کنید . |
3 | بردار X m را به صورت مشخص کنید |
xcx_d | ایکس |
xcy_d | y |
xcz_d+r_cl | z |
4 | بخش جرم و لحظه اینرسی را پیدا کنید . در قسمت متن m ، m_cl را تایپ کنید . |
نیروی کاربردی 1
1 | در پنجره Model Builder ، روی Applied Force 1 کلیک کنید . |
2 | در پنجره تنظیمات برای نیروی کاربردی ، بخش مکان را پیدا کنید . |
3 | بردار X p را به عنوان مشخص کنید |
xcx_d | ایکس |
xcy_d | y |
xcz_d+r_cl | z |
4 | قسمت Applied Force را پیدا کنید . بردار F را به صورت مشخص کنید |
0 | ایکس |
0 | y |
-m_cl*g_const | z |
مواد سفت و سخت: جرم متعادل کننده
1 | در پنجره Model Builder ، روی Rigid Material: Drum کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای مواد سفت و سخت ، در قسمت نوشتار Label عبارت Rigid Material: Balancing mass را تایپ کنید . |
3 | قسمت انتخاب دامنه را پیدا کنید . روی Clear Selection کلیک کنید . |
4 | فقط دامنه 6 را انتخاب کنید. |
جرم و لحظه اینرسی 1
1 | در پنجره Model Builder ، گره Rigid Material: Balancing mass را گسترش دهید ، سپس روی Mass and Moment of Inertia 1 کلیک کنید . |
2 | در پنجره تنظیمات جرم و لحظه اینرسی ، قسمت مرکز جرم را پیدا کنید . |
3 | بردار X m را به صورت مشخص کنید |
xcx_d+r_b*cos(phi0) | ایکس |
xcy_d | y |
xcz_d-r_b*sin(phi0) | z |
4 | بخش جرم و لحظه اینرسی را پیدا کنید . در قسمت متن m ، m_b را تایپ کنید . |
نیروی کاربردی 1
1 | در پنجره Model Builder ، روی Applied Force 1 کلیک کنید . |
2 | در پنجره تنظیمات برای نیروی کاربردی ، بخش مکان را پیدا کنید . |
3 | بردار X p را به عنوان مشخص کنید |
xcx_d+r_b*cos(phi0) | ایکس |
xcy_d | y |
xcz_d-r_b*sin(phi0) | z |
4 | قسمت Applied Force را پیدا کنید . بردار F را به صورت مشخص کنید |
0 | ایکس |
0 | y |
-m_b*g_const | z |
مواد سفت و سخت: شکاف
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای مواد سفت و سخت ، در قسمت نوشتار برچسب ، عبارت Rigid Material: Slot را تایپ کنید . |
3 | فقط دامنه 5 را انتخاب کنید. |
4 | قسمت Density را پیدا کنید . از لیست ρ ، User defined را انتخاب کنید . |
از اتصالات مسطح برای حمایت از واشر روی زمین در مکان های مختلف استفاده کنید. از نسخه الاستیک اتصال برای کاهش محدودیت های سیستم و در نتیجه امکان محاسبه نیروهای مشترک استفاده کنید.
مفصل مسطح: پشتیبانی 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره Settings برای Planar Joint ، Planar Joint: Support 1 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از لیست منبع ، ثابت را انتخاب کنید . |
4 | از لیست مقصد ، مواد سفت و سخت : واشر را انتخاب کنید . |
5 | قسمت Axis of Joint را پیدا کنید . بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
0 | y |
1 | z |
6 | قسمت Joint Elasticity را پیدا کنید . از لیست، اتصال الاستیک را انتخاب کنید . |
7 | قسمت نیروهای مشترک و لحظات را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Planar Joint: Support 1 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | فقط مرز 18 را انتخاب کنید. |
خاصیت ارتجاعی مفصل 1
1 | در پنجره Model Builder ، روی Joint Elasticity 1 کلیک کنید . |
2 | در پنجره تنظیمات برای Joint Elasticity ، بخش Spring را پیدا کنید . |
3 | در قسمت متن k u ، k_s را تایپ کنید . |
4 | در قسمت متن k θ ، k_s را تایپ کنید . |
5 | قسمت Viscous Damping را پیدا کنید . در قسمت متن c u ، c_s را تایپ کنید . |
6 | در قسمت متن c θ ، c_s را تایپ کنید . |
مفصل مسطح: پشتیبانی 1
در پنجره Model Builder ، روی Planar Joint: Support 1 کلیک کنید .
اصطکاک 1
1 | در نوار ابزار فیزیک ، روی |
2 | در پنجره تنظیمات برای اصطکاک ، قسمت اصطکاک را پیدا کنید . |
3 | در قسمت متن μ ، mu را تایپ کنید . |
با تکثیر Planar Joint، سه مفصل مسطح دیگر ایجاد کنید : پشتیبانی 1 .
مفصل مسطح: پشتیبانی 2
1 | روی Planar Joint: Support 1 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره Settings برای Planar Joint ، در قسمت Label عبارت Planar Joint: Support 2 را تایپ کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Planar Joint: Support 2 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : مرز ، قسمت انتخاب مرز را پیدا کنید . |
3 |
4 | فقط مرز 52 را انتخاب کنید. |
مفصل مسطح: پشتیبانی 3
1 | در پنجره Model Builder ، روی Planar Joint: Support 2 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره Settings برای Planar Joint ، Planar Joint: Support 3 را در قسمت نوشتار Label تایپ کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Planar Joint: Support 3 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : مرز ، قسمت انتخاب مرز را پیدا کنید . |
3 |
4 | فقط Boundary 58 را انتخاب کنید. |
مفصل مسطح: پشتیبانی 4
1 | در پنجره Model Builder ، روی Planar Joint: Support 3 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره Settings برای Planar Joint ، Planar Joint: Support 4 را در قسمت نوشتار Label تایپ کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Planar Joint: Support 4 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : مرز ، قسمت انتخاب مرز را پیدا کنید . |
3 |
4 | فقط مرز 24 را انتخاب کنید. |
اتصال بین واشر و درام را با استفاده از یک گره مفصل لولایی تعریف کنید .
مفصل لولا: واشر-درام
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات مربوط به مفصل لولایی ، در قسمت نوشتار Label ، لنگه اتصال: Washer-drum را تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از لیست Source ، Rigid Material: Washer را انتخاب کنید . |
4 | از لیست مقصد ، Rigid Material: Drum را انتخاب کنید . |
5 | قسمت Axis of Joint را پیدا کنید . بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
1 | y |
0 | z |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، Honge Joint: Washer-Drum node را گسترش دهید، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | فقط مرز 34 را انتخاب کنید. |
یک مفصل لولا بین درام و شکاف برای اصلاح موقعیت زاویه ای جرم متعادل کننده نسبت به درام تعریف کنید.
مفصل لولا: شکاف درام
1 | در پنجره Model Builder ، روی Hinge Joint: Washer-drum کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، در قسمت نوشتار برچسب ، لنگه اتصال: درام-اسلات را تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از فهرست منبع ، Rigid Material: Drum را انتخاب کنید . |
4 | از لیست مقصد ، Rigid Material: Slot را انتخاب کنید . |
برای تصحیح موقعیت شعاعی جرم متعادل کننده ، یک اتصال منشوری بین شکاف و جرم متعادل کننده تعریف کنید. در این مدل اصلاح شعاعی در نظر گرفته نشده است و حرکت نسبی در این مفصل کاملاً محدود شده است.
مفصل منشوری: جرم متعادل کننده شکاف
1 | در نوار ابزار Physics ، روی |
2 | در پنجره Settings برای Prismatic Joint ، در قسمت Label ، عبارت Prismatic Joint: Slot-balancing mass را تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از فهرست منبع ، Rigid Material: Slot را انتخاب کنید . |
4 | از لیست مقصد ، مواد سفت و سخت : جرم متعادل را انتخاب کنید . |
5 | قسمت Axis of Joint را پیدا کنید . از لیست، انتخاب یک لبه موازی را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، Prismatic Joint: Slot-balancing mass node را گسترش دهید، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | فقط مرز 34 را انتخاب کنید. |
محور مشترک 1
1 | در پنجره Model Builder ، روی Joint Axis 1 کلیک کنید . |
2 | فقط Edge 86 را انتخاب کنید. |
مفصل منشوری: جرم متعادل کننده شکاف
در پنجره Model Builder ، روی Prismatic Joint: Slot-balancing mass کلیک کنید .
حرکت تجویز شده 1
در نوار ابزار Physics ، روی Attributes کلیک کنید و Prescribed Motion را انتخاب کنید .
تعاریف جهانی
اضافه کردن توابع مرحله برای فعال و غیرفعال کردن مکانیسم کنترل.
مرحله 1 (مرحله 1)
1 | در نوار ابزار Home ، روی |
2 | در پنجره تنظیمات برای Step ، در قسمت متن نام تابع ، step_act را تایپ کنید . |
3 | قسمت Parameters را پیدا کنید . در قسمت متن مکان ، 7[s] را تایپ کنید . |
4 | برای گسترش بخش Smoothing کلیک کنید . در قسمت متن Size of transition zone ، 0.5 را تایپ کنید . |
5 |
مرحله 2 (step_act2)
1 | روی Step 1 (step_act) کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای Step ، در قسمت متن نام تابع ، step_deact را تایپ کنید . |
3 | قسمت Parameters را پیدا کنید . در قسمت متن مکان ، 5[deg] را تایپ کنید . |
4 | بخش Smoothing را پیدا کنید . در قسمت متن Size of transition zone ، 10[deg] را تایپ کنید . |
5 |
تعاریف
متغیرهای 1
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Definitions کلیک راست کرده و Variables را انتخاب کنید . |
2 | در پنجره تنظیمات برای متغیرها ، بخش متغیرها را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل washing_machine_walk_variables.txt دوبار کلیک کنید . |
متغیرهای نیروی اصطکاک را بر روی مرزهای تکیه گاه تعریف کنید.
متغیرها 2
1 | در پنجره Model Builder ، روی Definitions کلیک راست کرده و Variables را انتخاب کنید . |
2 | در پنجره تنظیمات برای متغیرها ، قسمت انتخاب موجودیت هندسی را پیدا کنید . |
3 | از لیست سطح نهاد هندسی ، Boundary را انتخاب کنید . |
4 | فقط مرز 18 را انتخاب کنید. |
5 | قسمت Variables را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
نام | اصطلاح | واحد | شرح |
Fsx | mbd.plj1.Fx | ن | نیروی اصطکاک، جزء x |
Fsy | mbd.plj1.Fy | ن | نیروی اصطکاک، جزء y |
متغیرها 3
1 | روی Definitions کلیک راست کرده و Variables را انتخاب کنید . |
2 | در پنجره تنظیمات برای متغیرها ، قسمت انتخاب موجودیت هندسی را پیدا کنید . |
3 | از لیست سطح نهاد هندسی ، Boundary را انتخاب کنید . |
4 | فقط مرز 52 را انتخاب کنید. |
5 | قسمت Variables را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
نام | اصطلاح | واحد | شرح |
Fsx | mbd.plj2.Fx | ن | نیروی اصطکاک، جزء x |
Fsy | mbd.plj2.Fy | ن | نیروی اصطکاک، جزء y |
متغیرهای 4
1 | روی Definitions کلیک راست کرده و Variables را انتخاب کنید . |
2 | در پنجره تنظیمات برای متغیرها ، قسمت انتخاب موجودیت هندسی را پیدا کنید . |
3 | از لیست سطح نهاد هندسی ، Boundary را انتخاب کنید . |
4 | فقط Boundary 58 را انتخاب کنید. |
5 | قسمت Variables را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
نام | اصطلاح | واحد | شرح |
Fsx | mbd.plj3.Fx | ن | نیروی اصطکاک، جزء x |
Fsy | mbd.plj3.Fy | ن | نیروی اصطکاک، جزء y |
متغیرهای 5
1 | روی Definitions کلیک راست کرده و Variables را انتخاب کنید . |
2 | در پنجره تنظیمات برای متغیرها ، قسمت انتخاب موجودیت هندسی را پیدا کنید . |
3 | از لیست سطح نهاد هندسی ، Boundary را انتخاب کنید . |
4 | فقط مرز 24 را انتخاب کنید. |
5 | قسمت Variables را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
نام | اصطلاح | واحد | شرح |
Fsx | mbd.plj4.Fx | ن | نیروی اصطکاک، جزء x |
Fsy | mbd.plj4.Fy | ن | نیروی اصطکاک، جزء y |
چرخش درام و اصلاح زاویه ای جرم متعادل کننده را مشخص کنید.
MULTIBODY DYNAMICS (MBD)
مفصل لولا: واشر-درام
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی مفصل Hinge Joint: Washer-Drum کلیک کنید .
حرکت تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای حرکت تجویز شده ، قسمت حرکت چرخشی تجویز شده را پیدا کنید . |
3 | از لیست حرکت تجویز شده ، سرعت زاویه ای را انتخاب کنید . |
4 | در قسمت متن ω p ، omega را تایپ کنید . |
مفصل لولا: شکاف درام
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی مفصل Hinge Joint: Drum-slot کلیک کنید .
حرکت تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای حرکت تجویز شده ، قسمت حرکت چرخشی تجویز شده را پیدا کنید . |
3 | از لیست حرکت تجویز شده ، سرعت زاویه ای را انتخاب کنید . |
4 | در قسمت متن ω p ، i_c*omegaC را تایپ کنید . |
مطالعه 1
برای انجام آنالیز با و بدون تعادل فعال، یک جارو پارامتریک اضافه کنید.
جارو پارامتریک
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره تنظیمات برای جابجایی پارامتری ، بخش تنظیمات مطالعه را پیدا کنید . |
3 |
4 | در جدول تنظیمات زیر را وارد کنید: |
نام پارامتر | لیست مقادیر پارامتر | واحد پارامتر |
i_c (وضعیت کنترل فعال) | 0 1 |
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
3 | در قسمت متن زمان خروجی ، range(0,0.01,9) را تایپ کنید . |
4 | در نوار ابزار مطالعه ، |
نتایج
جابجایی (mbd)
مجموعه داده های بیشتری برای تجسم بهتر در پس پردازش ایجاد کنید.
مطالعه 1 / راه حل های پارامتریک 1 (3) (sol2)
1 | در پنجره Model Builder ، گره Results>Datasets را گسترش دهید . |
2 | روی Results>Datasets>Study 1/Parametric Solutions 1 (sol2) کلیک راست کرده و Duplicate را انتخاب کنید . |
انتخاب
1 | در نوار ابزار نتایج ، روی |
2 | در پنجره تنظیمات برای انتخاب ، قسمت انتخاب موجودیت هندسی را پیدا کنید . |
3 | از لیست سطح نهاد هندسی ، دامنه را انتخاب کنید . |
4 | فقط دامنه 1 را انتخاب کنید. |
مطالعه 1/راه حل های پارامتریک 1 (4) (sol2)
در پنجره Model Builder ، در Results>Datasets ، روی Study 1/Parametric Solutions 1 (2) (sol2) کلیک راست کرده و Duplicate را انتخاب کنید .
انتخاب
1 | در نوار ابزار نتایج ، روی |
2 | در پنجره تنظیمات برای انتخاب ، قسمت انتخاب موجودیت هندسی را پیدا کنید . |
3 | از لیست سطح نهاد هندسی ، دامنه را انتخاب کنید . |
4 | در پنجره Graphics کلیک کنید و سپس Ctrl+A را فشار دهید تا همه دامنه ها انتخاب شوند. |
5 | فقط دامنه های 2-8 را انتخاب کنید. |
6 | تیک Propagate to low dimensions را پاک کنید . |
دستورالعمل ها را برای ترسیم نیروهای جابجایی واشر و اصطکاک همانطور که در شکل 2 و شکل 3 نشان داده شده است، دنبال کنید .
جابجایی واشر
1 | در نوار ابزار نتایج ، روی |
2 | در پنجره تنظیمات برای گروه طرح سه بعدی ، Washer Displacement را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Data را پیدا کنید . از فهرست مجموعه داده ، مطالعه 1/ راه حل های پارامتریک 1 (3) (sol2) را انتخاب کنید . |
4 | از لیست مقدار پارامتر (i_c) ، 0 را انتخاب کنید . |
5 | از لیست زمان (ها) ، 8.9 را انتخاب کنید . |
6 | قسمت Plot Settings را پیدا کنید . از لیست Frame ، Spatial (x، y، z) را انتخاب کنید . |
جلد 1
1 | روی Washer Displacement کلیک راست کرده و Volume را انتخاب کنید . |
2 | در پنجره تنظیمات برای حجم ، قسمت Coloring and Style را پیدا کنید . |
3 |
4 | در کادر محاوره ای Color Table ، Rainbow>SpectrumLight را در درخت انتخاب کنید. |
5 | روی OK کلیک کنید . |
تغییر شکل 1
1 | روی Volume 1 کلیک راست کرده و Deformation را انتخاب کنید . |
2 | در پنجره تنظیمات برای تغییر شکل ، بخش مقیاس را پیدا کنید . |
3 | چک باکس Scale factor را انتخاب کنید . در فیلد متن مرتبط، 100 را تایپ کنید . |
4 | در نوار ابزار Washer Displacement ، روی |
5 |
6 |
نیروی اصطکاک
1 | در پنجره Model Builder ، روی Washer Displacement کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح سه بعدی ، نیروی اصطکاک را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Data را پیدا کنید . از لیست مجموعه داده ، مطالعه 1/ راه حل های پارامتریک 1 (4) (sol2) را انتخاب کنید . |
4 | در پنجره Model Builder ، گره نیروی اصطکاک را گسترش دهید . |
تغییر شکل 1
1 | در پنجره Model Builder ، گره Results>Friction Force>Volume 1 را گسترش دهید ، سپس روی Deformation 1 کلیک کنید . |
2 | در پنجره تنظیمات برای تغییر شکل ، بخش مقیاس را پیدا کنید . |
3 | در قسمت متنی Scale factor ، 1 را تایپ کنید . |
4 | در نوار ابزار نیروی اصطکاک ، روی |
سطح پیکان 1
1 | در پنجره Model Builder ، روی Friction Force کلیک راست کرده و Arrow Surface را انتخاب کنید . |
2 | در پنجره تنظیمات برای Arrow Surface ، بخش Expression را پیدا کنید . |
3 | در قسمت متن X جزء ، Fsx را تایپ کنید . |
4 | در قسمت متنی جزء Y ، Fsy را تایپ کنید . |
5 | در قسمت متنی مولفه Z ، 0 را تایپ کنید . |
6 | قسمت Coloring and Style را پیدا کنید . |
7 | چک باکس Scale factor را انتخاب کنید . در قسمت متن مرتبط، 0.04 را تایپ کنید . |
8 | در نوار ابزار نیروی اصطکاک ، روی |
9 |
10 |
این دستورالعمل ها را دنبال کنید تا کل عدم تعادل در قاب چرخان و ثابت را همانطور که در شکل 4 و شکل 5 نشان داده شده است، ترسیم کنید .
عدم تعادل کل (محلی)
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Total Imbalance (محلی) را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Data را پیدا کنید . از فهرست مجموعه داده ، مطالعه 1/ راه حل های پارامتریک 1 (2) (sol2) را انتخاب کنید . |
4 | برای گسترش بخش عنوان کلیک کنید . از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
5 | قسمت Plot Settings را پیدا کنید . |
6 | کادر بررسی برچسب محور y را انتخاب کنید . در فیلد متن مرتبط، Total imbalance (N) را تایپ کنید . |
7 | قسمت Legend را پیدا کنید . از لیست موقعیت ، سمت چپ بالا را انتخاب کنید . |
جهانی 1
1 | روی Total Imbalance (Local) کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Definitions>Variables>Fxl – Total disbalance، xl component – N را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Definitions>Variables>Fzl – Total disbalance، zl component – N را انتخاب کنید . |
4 | برای گسترش بخش Coloring and Style کلیک کنید . زیربخش Line style را پیدا کنید . از لیست خط ، چرخه را انتخاب کنید . |
5 | از لیست Width ، 2 را انتخاب کنید . |
6 | در نوار ابزار Total Imbalance (محلی) ، روی |
7 |
عدم تعادل کل
1 | در پنجره Model Builder ، روی Total Imbalance (Local) کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Total Imbalance را در قسمت متن برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Total Imbalance را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Definitions>Variables>Fx – Total disbalance، x component – N را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Definitions>Variables>Fz – Total disbalance، z component – N را انتخاب کنید . |
4 | در نوار ابزار Total Imbalance ، روی |
5 |
دستورالعمل های زیر را دنبال کنید تا حاشیه لغزش برای پشتیبانی 1، پشتیبانی 3، و حاشیه لغزش کل به ترتیب در شکل 6 و شکل 7 نشان داده شده باشد .
حاشیه لغزش
1 | در پنجره Model Builder ، روی Total Imbalance کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Slip Margin را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Data را پیدا کنید . از لیست انتخاب پارامتر (i_c) ، First را انتخاب کنید . |
4 | قسمت Plot Settings را پیدا کنید . در قسمت متن برچسب محور y ، Slip margin (N) را تایپ کنید . |
5 | قسمت Legend را پیدا کنید . از لیست موقعیت ، پایین سمت چپ را انتخاب کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Slip Margin را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Definitions>Variables>Msl1 – Slip margin، support 1 – N را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Definitions>Variables>Msl3 – Slip margin، support 3 – N را انتخاب کنید . |
4 | در نوار ابزار Slip Margin ، روی |
5 |
حاشیه لغزش کل
1 | در پنجره Model Builder ، روی Slip Margin کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، حاشیه لغزش کل را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Data را پیدا کنید . از لیست انتخاب پارامتر (i_c) ، همه را انتخاب کنید . |
4 | قسمت Plot Settings را پیدا کنید . کادر بررسی برچسب محور y را پاک کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Total Slip Margin را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Definitions>Variables>Msl_tot – Total Slip Margin – N را انتخاب کنید . |
3 | برای گسترش بخش Legends کلیک کنید . زیربخش Include را پیدا کنید . کادر بررسی توضیحات را پاک کنید . |
4 | در نوار ابزار Total Slip Margin ، روی |
5 |
برای ترسیم جابجایی زاویه ای واشر همانطور که در شکل 8 نشان داده شده است ، دستورالعمل های زیر را دنبال کنید.
چرخش واشر
1 | در پنجره Model Builder ، روی Total Slip Margin کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Washer Rotation را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Legend را پیدا کنید . از لیست موقعیت ، سمت چپ بالا را انتخاب کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Washer Rotation را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Rigid domains>Rigid Material: Washer>Rigid body rotation (Spatial frame) – rad>mbd.rd1.thz – Rigid body rotation، z component را انتخاب کنید . |
واحدها را از رادیان به درجه تغییر دهید.
3 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rd1.thz | درجه | چرخش بدنه صلب، جزء z |
4 | در نوار ابزار Washer Rotation ، روی |
همانطور که در شکل 9 نشان داده شده است، از دستورالعمل های زیر برای ترسیم RPM درام و موتور اصلاح استفاده کنید .
5 |
سرعت زاویهای
1 | در پنجره Model Builder ، روی Washer Rotation کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Angular Velocity را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Data را پیدا کنید . از لیست انتخاب پارامتر (i_c) ، گزینه Last را انتخاب کنید . |
4 | قسمت Plot Settings را پیدا کنید . |
5 | کادر بررسی برچسب محور y را انتخاب کنید . در قسمت متن مرتبط، سرعت زاویه ای (rpm) را تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Angular Velocity را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
دور در دقیقه | 1 | سرعت زاویه ای درام (rpm) |
دور در دقیقه | 1 | تصحیح سرعت زاویه ای (rpm) |
4 | قسمت Legends را پیدا کنید . زیربخش Include را پیدا کنید . چک باکس Description را انتخاب کنید . |
5 | در نوار ابزار Angular Velocity ، روی |
6 |
از دستورالعمل های زیر برای رسم زاویه تصحیح نشان داده شده در شکل 10 استفاده کنید .
زاویه تصحیح
1 | در پنجره Model Builder ، روی Angular Velocity کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Correction Angle را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Plot Settings را پیدا کنید . کادر بررسی برچسب محور y را پاک کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Correction Angle را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Definitions>Variables>d_th – Correction angle – rad را انتخاب کنید . |
3 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
d_th | درجه | زاویه اصلاح |
4 | قسمت Legends را پیدا کنید . تیک Show legends را پاک کنید . |
5 | در نوار ابزار Correction Angle ، روی |
6 |



