
نیروها و لحظات روی چرخ دنده های مخروطی
معرفی
این مدل یک جفت چرخ دنده مخروطی مخروطی مستقیم را شبیه سازی می کند. چرخ دنده ها به صورت سفت و سخت مدل سازی شده اند. یک تحلیل گذرا برای محاسبه نیروها و گشتاورها در مرکز دنده ثابت انجام می شود. این مدل با استفاده از قابلیت چرخ دنده در رابط Multibody Dynamics در COMSOL Multiphysics ساخته شده است.
داده های این مدل از Ref. 1 . نتایج تجزیه و تحلیل با نتایج ارائه شده در مرجع مقایسه می شود.
تعریف مدل
هندسه مدل در شکل 1 نشان داده شده است . دارای سه جزء است: چرخ، پینیون و میله سفت و سخت. چرخ و پینیون هر دو به عنوان چرخ دنده های مخروطی مدل سازی شده اند. چرخ در محل خود ثابت است. پینیون بر روی یک میله سفت و سخت از طریق یک مفصل لولا نصب می شود. میله سفت و سخت در نقطه ای که روی محور چرخ قرار دارد، لولا شده است.
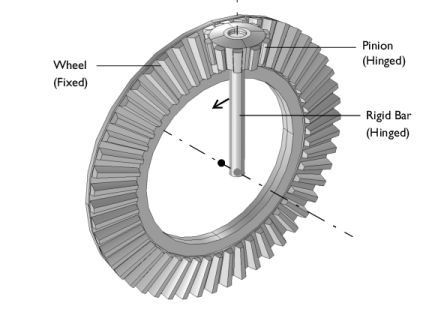
شکل 1: هندسه مدل. مرکز چرخ، محل لولای میله صلب، و محور هر دو چرخ دنده نیز نشان داده شده است.
پارامترهای مدل
خواص چرخ و پینیون در جدول زیر آورده شده است:
خواص | چرخ | پینیون | |
تعداد دندان ها | n | 50 | 10 |
قطر گام | d p | 100 میلی متر | 20 میلی متر |
زاویه فشار | آ | 20 درجه | 20 درجه |
زاویه مخروطی | ج | 78.7 درجه | 11.3 درجه |
مرکز چرخش | x c | ( 0، 0، 0 ) میلی متر | ( 0، -10، 50 ) میلی متر |
محور چرخش | eg _ | ( 0، -1، 0 ) | ( 0, 0, -1 ) |
پینیون به میله صلب حول محور خود لولا شده است. میله سفت و سخت حول محور چرخ به زمین لولا شده است. مرکز این مفصل لولا ( 0، 10 میلی متر ، 0 ) است.
محدودیت ها و بارها
• | چرخ به زمین ثابت شده است. |
• | به میله صلب یک چرخش 1 راد داده می شود. |
• | گشتاور مقاومتی 10 نیوتن متر در محل اتصال بین پینیون و میله صلب اعمال می شود. |
نتایج و بحث
مقایسه نتایج محاسبه شده با راه حل ارائه شده در Ref. 1 در جداول زیر آورده شده است:
FC | FX | FY | FZ | |
مقادیر محاسبه شده (به N) | 1064.2 | 600.32 | 356.92 | 802.94 |
مقادیر مرجع (به N) | 1064 | 600.35 | 356.9 | 802.9 |
MX | من | MZ | |
مقادیر محاسبه شده (به N·m) | -9.642 | 50 | -15.017 |
مقادیر مرجع (به N·m) | -9.641 | 50 | -15.016 |
مشاهده می شود که مقادیر محاسبه شده نیروها و گشتاورها در تطابق بسیار نزدیک با مقادیر مرجع هستند. واحدها و سیستم مختصات در مدل مرجع متفاوت است. از این رو نتایج مرجع قبل از استفاده از آنها برای مقایسه به طور مناسب تنظیم می شوند.
شکل 2 موقعیت پینیون و میله صلب را پس از 1 راد چرخش نشان می دهد.
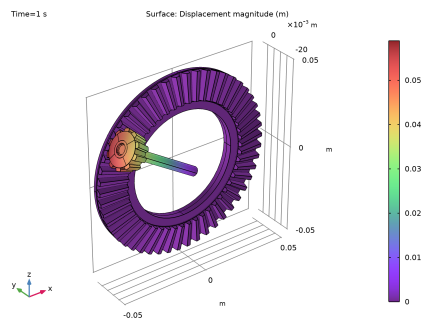
شکل 2: جابجایی پینیون و میله صلب پس از 1 راد چرخش.
شکل 3 و شکل 4 نیروهای واکنش و گشتاورها را در مرکز چرخ نشان می دهد. نیروها و گشتاورها برای موقعیت های مختلف پینیون ترسیم می شوند.
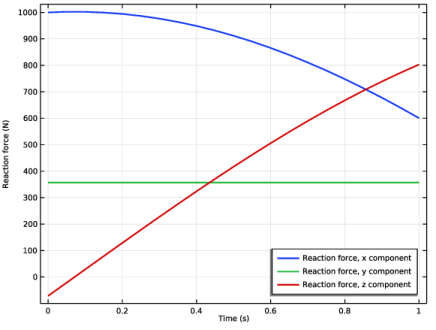
شکل 3: نیروهای واکنش در مرکز چرخ.
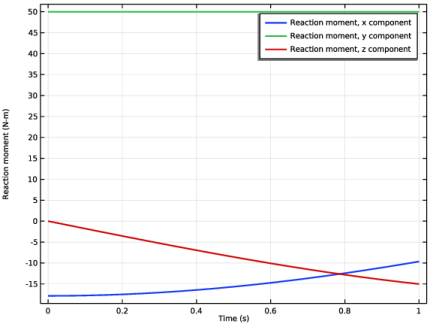
شکل 4: لحظات واکنش در مرکز چرخ.
نکاتی درباره پیاده سازی COMSOL
• | برای ساخت هندسه چرخ دنده، می توانید یک قطعه چرخ دنده را از کتابخانه قطعات وارد کرده و با تغییر پارامترهای ورودی آن را سفارشی کنید. همچنین می توانید یک دیسک یا مخروط معادل برای نشان دادن چرخ دنده ایجاد کنید. |
• | همه دنده ها سفت فرض می شوند. الاستیسیته یک توری چرخ دنده را می توان در گره های Gear Pair با استفاده از زیرگره Gear Elasticity گنجاند . |
• | تمام گره های Gear Pair ایده آل و بدون اصطکاک فرض می شوند. در صورت نیاز میتوانید زیرگرههای خطای انتقال ، بکلش یا اصطکاک را اضافه کنید. |
• | برای محدود کردن حرکت یک چرخ دنده، میتوانید از زیرگرههای Desplacement/Rotation یا Fixed Constraint استفاده کنید . از طرف دیگر، میتوانید چرخدندهها را از طریق گرههای مختلف مشترک روی یک شفت یا روی زمین نصب کنید . |
• | نیروی تماس در یک جفت دنده با استفاده از محدودیت های ضعیف یا روش مجازات محاسبه می شود . به طور پیش فرض، محاسبه نیروی تماس خاموش است. برای نیروهای تماس دقیق تر از روش قیود ضعیف استفاده کنید. با این حال، ترجیحاً می توانید به روش جریمه برای سیستم های بدنه سفت و سخت بزرگ بروید. |
منابع
1. A. Cardona, “Three-Dimensional Gears Modeling in Multibody Systems Analysis,” International Journal for Numerical Methods in Engineering , vol. 40، صص 357-381، 1997.
مسیر کتابخانه برنامه: Multibody_Dynamics_Module/Verification_Examples/bevel_gear_pair
دستورالعمل مدلسازی
از منوی File ، New را انتخاب کنید .
جدید
در پنجره جدید ، روی  Model Wizard کلیک کنید .
Model Wizard کلیک کنید .
مدل جادوگر
1 | در پنجره Model Wizard ، روی |
2 | در درخت Select Physics ، Structural Mechanics>Multibody Dynamics (mbd) را انتخاب کنید . |
3 | روی افزودن کلیک کنید . |
4 |
5 | در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
6 |
تعاریف جهانی
پارامترهای 1
1 | در پنجره Model Builder ، در قسمت Global Definitions روی Parameters 1 کلیک کنید . |
2 | در پنجره تنظیمات برای پارامترها ، بخش پارامترها را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل bevel_gear_pair_parameters.txt دوبار کلیک کنید . |
کتابخانه های بخش
1 | در نوار ابزار Home ، روی |
2 | در پنجره Part Libraries ، Multibody Dynamics Module>3D>External Gears>bevel_gear را در درخت انتخاب کنید . |
3 |
هندسه 1
Bevel Gear 1 (pi1)
1 | در نوار ابزار Home ، روی |
برای سفارشی کردن هندسه چرخ دنده، پارامترهای چرخ دنده را در پارامترهای ورودی قطعه وارد کنید.
2 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Bevel Gear 1 (pi1) کلیک کنید . |
3 | در پنجره تنظیمات برای نمونه قسمت ، قسمت پارامترهای ورودی را پیدا کنید . |
4 | در جدول تنظیمات زیر را وارد کنید: |
نام | اصطلاح | ارزش | شرح |
n | n1 | 50 | تعداد دندان ها |
dp | dp1 | 0.1 متر | قطر گام |
آلفا | آلفا | 20 درجه | زاویه فشار |
گاما | گاما 1 | 78.7 درجه | زاویه مخروطی |
adr | 0.75 | 0.75 | نسبت افزودنی به ماژول |
tfr | 0 | 0 | نسبت شعاع فیله نوک به قطر گام (برای بدون فیله 0 را تنظیم کنید) |
rfr | 0 | 0 | نسبت شعاع فیله ریشه به قطر زمین (برای بدون فیله 0 را تنظیم کنید) |
dr | 0.6 | 0.6 | نسبت قطر سوراخ به قطر گام (برای بدون سوراخ 0 تنظیم کنید) |
wgr | 0.03 | 0.03 | نسبت عرض چرخ دنده به قطر گام |
lsr | 0 | 0 | نسبت طول شفت به قطر گام (تنظیم 0 برای بدون شفت) |
xc | xcx1 | 0 متر | مرکز دنده، مختصات x |
yc | xcy1 | 0 متر | مرکز دنده، y مختصات |
zc | xcz1 | 0 متر | مرکز دنده، مختصات z |
به عنوان مثال | سابق 1 | 0 | محور چرخ دنده، جزء x |
یکی | اوه1 | -1 | محور چرخ دنده، جزء y |
کپی ها | این 1 | 0 | محور دنده، جزء z |
Bevel Gear 2 (pi2)
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای نمونه قسمت ، قسمت پارامترهای ورودی را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
نام | اصطلاح | ارزش | شرح |
n | n2 | 10 | تعداد دندان ها |
dp | dp2 | 0.02 متر | قطر گام |
آلفا | آلفا | 20 درجه | زاویه فشار |
گاما | گاما 2 | 11.3 درجه | زاویه مخروطی |
adr | 0.3 | 0.3 | نسبت افزودنی به ماژول |
htr | 3 | 3 | نسبت ارتفاع دندان به اضافه |
tfr | 0 | 0 | نسبت شعاع فیله نوک به قطر گام (برای بدون فیله 0 را تنظیم کنید) |
rfr | 0 | 0 | نسبت شعاع فیله ریشه به قطر زمین (برای بدون فیله 0 را تنظیم کنید) |
wgr | 0.4 | 0.4 | نسبت عرض چرخ دنده به قطر گام |
wbr | 0.1 | 0.1 | نسبت عرض مخروط پشت به عرض دنده |
wcr | 0 | 0 | نسبت عرض یقه به عرض دنده (برای بدون یقه 0 را تنظیم کنید) |
lsr | 0 | 0 | نسبت طول شفت به قطر گام (تنظیم 0 برای بدون شفت) |
xc | xcx2 | 0 متر | مرکز دنده، مختصات x |
yc | xcy2 | -0.01 متر | مرکز دنده، y مختصات |
zc | xcz2 | 0.05 متر | مرکز دنده، مختصات z |
به عنوان مثال | سابق 2 | 0 | محور چرخ دنده، جزء x |
یکی | هی2 | 0 | محور چرخ دنده، جزء y |
کپی ها | i2 | -1 | محور دنده، جزء z |
هفتم | 360/(2*n2)[درجه] | 18 درجه | زاویه تراز مش |
سیلندر 1 (cyl1)
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات سیلندر ، بخش اندازه و شکل را پیدا کنید . |
3 | در قسمت متن Radius ، dp2/8 را تایپ کنید . |
4 | در قسمت متن ارتفاع ، dp1/2 را تایپ کنید . |
5 | قسمت Position را پیدا کنید . در قسمت متن x ، xcx2 را تایپ کنید . |
6 | در قسمت متن y ، xcy2 را تایپ کنید . |
7 | در قسمت متن z ، xcz2 را تایپ کنید . |
8 | قسمت Axis را پیدا کنید . از لیست نوع محور ، دکارتی را انتخاب کنید . |
9 | در قسمت متن z ، -1 را تایپ کنید . |
فرم اتحادیه (فین)
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Form Union (fin) کلیک کنید . |
2 | در پنجره تنظیمات Form Union/Assembly ، بخش Form Union/Assembly را پیدا کنید . |
3 | از لیست Action ، Form an assembly را انتخاب کنید . |
4 | تیک Create Pairs را پاک کنید . |
5 | در نوار ابزار Geometry ، روی |
MULTIBODY DYNAMICS (MBD)
دو گره Bevel Gear اضافه کنید و تمام خصوصیات چرخ دنده ها را مشخص کنید. برای ایجاد خودکار گرههای Bevel Gear از قسمتهای هندسی، از بخش Automated Model Setup گره Multibody Dynamics استفاده کنید.
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Multibody Dynamics (mbd) کلیک کنید . |
2 | در پنجره تنظیمات برای Multibody Dynamics ، روی Physics Node Generation در گوشه سمت راست بالای بخش Automated Model Setup کلیک کنید . از منو، Create Gears را انتخاب کنید . |
Bevel Gear 1
1 | در پنجره Model Builder ، گره Gears را گسترش دهید ، سپس روی Bevel Gear 1 کلیک کنید . |
2 | در پنجره تنظیمات برای Bevel Gear ، بخش Density را پیدا کنید . |
3 | از لیست ρ ، User defined را انتخاب کنید . |
محدودیت ثابت 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای محدودیت ثابت ، برای گسترش بخش تنظیمات نیروی واکنش کلیک کنید . |
3 | کادر بررسی نیروهای واکنش را انتخاب کنید . |
Bevel Gear 2
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd)>Gears روی Bevel Gear 2 کلیک کنید . |
2 | در پنجره تنظیمات برای Bevel Gear ، بخش Density را پیدا کنید . |
3 | از لیست ρ ، User defined را انتخاب کنید . |
اکنون یک گره Gear Pair برای اتصال دو چرخ دنده مخروطی اضافه کنید.
جفت دنده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Gear Pair ، بخش Gear Selection را پیدا کنید . |
3 | از لیست چرخ ، Bevel Gear 1 را انتخاب کنید . |
4 | از لیست Pinion ، Bevel Gear 2 را انتخاب کنید . |
5 | بخش محاسبه نیروی تماس را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
مواد سفت و سخت: نوار
1 | در نوار ابزار Physics ، روی |
2 | فقط دامنه 5 را انتخاب کنید. |
3 | در پنجره تنظیمات برای مواد سفت و سخت ، در قسمت نوشتار برچسب ، نوار سخت را تایپ کنید . |
4 | قسمت Density را پیدا کنید . از لیست ρ ، User defined را انتخاب کنید . |
مفصل لولا 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت انتخاب پیوست را پیدا کنید . |
3 | از فهرست منبع ، Rigid Material: Bar را انتخاب کنید . |
4 | از لیست مقصد ، Bevel Gear 2 را انتخاب کنید . |
5 | قسمت Center of Joint را پیدا کنید . از لیست، Centroid موجودیت های انتخاب شده را انتخاب کنید . |
6 | از لیست سطح نهاد ، نقطه را انتخاب کنید . |
مرکز مفصل: نقطه 1
1 | در پنجره Model Builder ، روی Center of Joint: Point 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : نقطه ، قسمت انتخاب نقطه را پیدا کنید . |
3 |
4 | در کادر محاورهای Paste Selection ، 648, 650 را در قسمت متن انتخاب تایپ کنید . |
5 | روی OK کلیک کنید . |
مفصل لولا 1
1 | در پنجره Model Builder ، روی Hinge Joint 1 کلیک کنید . |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، بخش Axis of Joint را پیدا کنید . |
3 | بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
0 | y |
1 | z |
یک گشتاور خارجی روی این مفصل اعمال کنید.
نیروی اعمالی و لحظه 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای نیروی اعمال شده و لحظه ، بخش Applied On را پیدا کنید . |
3 | از لیست، Joint را انتخاب کنید . |
4 | بخش نیروی اعمال شده و لحظه را پیدا کنید . در قسمت متن M ، M_b را تایپ کنید . |
مفصل لولا 2
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت انتخاب پیوست را پیدا کنید . |
3 | از لیست منبع ، ثابت را انتخاب کنید . |
4 | از لیست مقصد ، Rigid Material: Bar را انتخاب کنید . |
5 | قسمت Center of Joint را پیدا کنید . از لیست سطح نهاد ، نقطه را انتخاب کنید . |
مرکز مفصل: نقطه 1
1 | در پنجره Model Builder ، روی Center of Joint: Point 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : نقطه ، قسمت انتخاب نقطه را پیدا کنید . |
3 |
4 | در کادر محاورهای Paste Selection ، 647, 649 را در قسمت متن انتخاب تایپ کنید . |
5 | روی OK کلیک کنید . |
مفصل لولا 2
1 | در پنجره Model Builder ، روی Hinge Joint 2 کلیک کنید . |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، بخش Axis of Joint را پیدا کنید . |
3 | بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
1 | y |
0 | z |
حرکت تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای حرکت تجویز شده ، قسمت حرکت چرخشی تجویز شده را پیدا کنید . |
3 | در قسمت متن θ p ، -th_b*t[1/s] را تایپ کنید . |
مش 1
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Mesh 1 کلیک کنید . |
2 | در پنجره تنظیمات مش ، قسمت Physics-Controlled Mesh را پیدا کنید . |
3 | از لیست اندازه عنصر ، Fine را انتخاب کنید . |
مطالعه 1
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در بخش مطالعه 1 ، روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
3 | در قسمت متن زمان خروجی ، range(0,0.05,1) را تایپ کنید . |
4 | در نوار ابزار صفحه اصلی ، |
نتایج
جابجایی (mbd)
1 | در نوار ابزار Displacement (mbd) ، روی |
2 |
نیروی تماس، نیروی واکنش و لحظه واکنش در مرکز چرخ دنده مخروطی ثابت را ارزیابی کنید.
ارزیابی جهانی 1
1 | در نوار ابزار نتایج ، روی ارزیابی |
2 | در پنجره تنظیمات برای ارزیابی جهانی ، بخش داده را پیدا کنید . |
3 | از لیست انتخاب زمان ، آخرین را انتخاب کنید . |
4 | روی Replace Expression در گوشه سمت راست بالای بخش Expressions کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Gear pairs>Gear Pair 1>mbd.grp1.Fc – Force at point contact – N را انتخاب کنید . |
5 |
ارزیابی جهانی 2
1 | در نوار ابزار نتایج ، روی ارزیابی |
2 | در پنجره تنظیمات برای ارزیابی جهانی ، بخش داده را پیدا کنید . |
3 | از لیست انتخاب زمان ، آخرین را انتخاب کنید . |
4 | روی Replace Expression در گوشه سمت راست بالای بخش Expressions کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Bevel Gears>Bevel Gear 1>Reaction force – N>mbd.bvg1.RFx – Reaction force، x component را انتخاب کنید . |
5 | روی Add Expression در گوشه سمت راست بالای بخش Expressions کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Bevel Gears>Bevel Gear 1>Reaction force – N>mbd.bvg1.RFy – Reaction force، y component را انتخاب کنید . |
6 | روی Add Expression در گوشه سمت راست بالای بخش Expressions کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Bevel Gears>Bevel Gear 1>Reaction force – N>mbd.bvg1.RFz – Reaction force، z component را انتخاب کنید . |
7 |
ارزیابی جهانی 3
1 | در نوار ابزار نتایج ، روی ارزیابی |
2 | در پنجره تنظیمات برای ارزیابی جهانی ، بخش داده را پیدا کنید . |
3 | از لیست انتخاب زمان ، آخرین را انتخاب کنید . |
4 | روی Replace Expression در گوشه سمت راست بالای بخش Expressions کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Bevel Gears>Bevel Gear 1>Reaction moment – N·m>mbd.bvg1.RMx – Reaction moment, x component را انتخاب کنید . |
5 | روی Add Expression در گوشه سمت راست بالای بخش Expressions کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Bevel Gears>Bevel Gear 1>Reaction moment – N·m>mbd.bvg1.RMy – Reaction moment, y component را انتخاب کنید . |
6 | روی Add Expression در گوشه سمت راست بالای بخش Expressions کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Bevel Gears>Bevel Gear 1>Reaction moment – N·m>mbd.bvg1.RMz – Reaction moment، z component را انتخاب کنید . |
7 |
از دستورالعمل های زیر برای ترسیم تغییرات زمانی نیروهای واکنش و گشتاورهای واکنش همانطور که به ترتیب در شکل 3 و شکل 4 نشان داده شده است استفاده کنید .
نیروهای واکنش
1 | در نوار ابزار نتایج ، روی |
2 | در پنجره Settings for 1D Plot Group ، Reaction force را در قسمت نوشتار Label تایپ کنید . |
جهانی 1
1 | روی Reaction force کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Bevel Gears>Bevel Gear 1>Reaction force – N>mbd.bvg1.RFx – Reaction force، x component را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Bevel Gears>Bevel Gear 1>Reaction force – N>mbd.bvg1.RFy – Reaction force، y component را انتخاب کنید . |
4 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Bevel Gears>Bevel Gear 1>Reaction force – N>mbd.bvg1.RFz – Reaction force، z component را انتخاب کنید . |
5 | برای گسترش بخش Coloring and Style کلیک کنید . از لیست Width ، 2 را انتخاب کنید . |
نیروهای واکنش
1 | در پنجره Model Builder ، روی Reaction force کلیک کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، برای گسترش بخش عنوان کلیک کنید . |
3 | از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
4 | قسمت Plot Settings را پیدا کنید . |
5 | کادر بررسی برچسب محور y را انتخاب کنید . در فیلد متن مرتبط، نیروی واکنش (N) را تایپ کنید . |
6 | قسمت Legend را پیدا کنید . از لیست موقعیت ، پایین سمت راست را انتخاب کنید . |
7 | در نوار ابزار نیروهای واکنش ، روی |
8 |
لحظات واکنش
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Reaction moments را در قسمت نوشتار Label تایپ کنید . |
جهانی 1
1 | روی Reaction moments کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Bevel Gears>Bevel Gear 1>Reaction moment – N·m>mbd.bvg1.RMx – Reaction moment, x component را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Bevel Gears>Bevel Gear 1>Reaction moment – N·m>mbd.bvg1.RMy – Reaction moment, y component را انتخاب کنید . |
4 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Bevel Gears>Bevel Gear 1>Reaction moment – N·m>mbd.bvg1.RMz – Reaction moment، z component را انتخاب کنید . |
5 | قسمت Coloring and Style را پیدا کنید . از لیست Width ، 2 را انتخاب کنید . |
لحظات واکنش
1 | در پنجره Model Builder ، روی Reaction moments کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Title را پیدا کنید . |
3 | از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
4 | قسمت Plot Settings را پیدا کنید . |
5 | کادر بررسی برچسب محور y را انتخاب کنید . در قسمت متن مرتبط، Reaction moment (Nm) را تایپ کنید . |
6 | در نوار ابزار Reaction moments ، روی |
7 |
نمودار سرعت پیش فرض را برای نشان دادن چرخ دنده ها تغییر دهید و از آن برای ایجاد یک انیمیشن استفاده کنید.
چرخ دنده ها
1 | در پنجره Model Builder ، گره Results>Velocity (mbd) را گسترش دهید ، سپس روی Velocity (mbd) کلیک کنید . |
2 | در پنجره تنظیمات برای گروه طرح سه بعدی ، Gears را در قسمت نوشتار برچسب تایپ کنید . |
خط پیکان
1 | در پنجره Model Builder ، در Results>Gears روی Arrow Line راست کلیک کرده و Delete را انتخاب کنید . |
2 | برای تایید روی Yes کلیک کنید . |
جلد
1 | در پنجره Model Builder ، در بخش Results>Gears روی Volume کلیک کنید . |
2 | در پنجره تنظیمات برای حجم ، قسمت Coloring and Style را پیدا کنید . |
3 |
4 | در کادر محاوره ای جدول رنگ ، Aurora>AuroraAustralis را در درخت انتخاب کنید. |
5 | روی OK کلیک کنید . |
جلد
1 | در پنجره Model Builder ، روی Volume کلیک کنید . |
2 | در نوار ابزار Gears ، روی |
انیمیشن 1
1 | در نوار ابزار نتایج ، روی |
2 | در پنجره تنظیمات انیمیشن ، بخش صحنه را پیدا کنید . |
3 | از لیست موضوع ، Gears را انتخاب کنید . |



