
معرفی
یاتاقان ها در ماشین ها برای کاهش اصطکاک بین قطعات متحرک و در نتیجه صاف کردن حرکت نسبی آنها استفاده می شوند. بلبرینگ المنت غلتکی یکی از یاتاقان های پرکاربرد است که در آن از عناصر غلتکی یا غلتک برای تحمل بار استفاده می شود. این غلتک ها می توانند اشکال مختلفی داشته باشند – به عنوان مثال – کروی، استوانه ای، یا استوانه ای مخروطی.
این مدل دینامیک یک غلتک استوانه ای را شبیه سازی می کند. در اینجا، غلتک های استوانه ای متعددی بین نژاد بیرونی و داخلی قرار داده شده و با کمک قفس در جای خود نگه داشته می شوند. مسابقه داخلی به یک شفت دوار و نژاد بیرونی به یک پایه ثابت متصل است. تمام اجزای بلبرینگ صلب فرض می شوند. تماس اصطکاکی بین غلتکها و نژادها با استفاده از تماس بدنه صلب با اصطکاک مدلسازی میشود. اتصال بین غلتک ها و قفس با استفاده از اتصالات لولا ساده شده است. یک بار خارجی بر روی مسابقه داخلی اعمال میشود و یک مطالعه گذرا برای تجزیه و تحلیل دینامیک جانبی مسابقه داخلی، دینامیک غلتکها و قفس، نیروهای تماس و اصطکاک و اتلاف انرژی در اثر اصطکاک انجام میشود.
تعریف مدل
هندسه مدل شامل دوازده غلتک استوانهای یکسان به شعاع 6 میلیمتر است که بین دو دسته استوانهای متحدالمرکز به ضخامت هر کدام 4.875 میلیمتر قرار گرفتهاند.
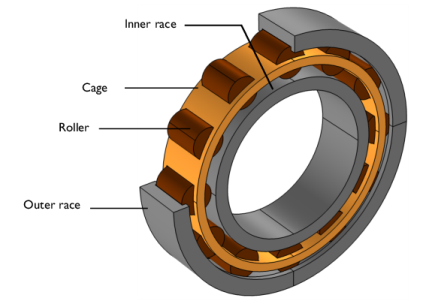
شکل 1: هندسه مدل غلتک استوانه ای.
شعاع داخلی نژاد بیرونی 45.125 میلی متر و شعاع بیرونی نژاد داخلی 32.875 میلی متر است. همانطور که در شکل 1 نشان داده شده است، از یک حلقه استوانه ای شکاف دار به نام قفس برای نگه داشتن غلتک ها در جای خود و جدا نگه داشتن آنها استفاده می شود. تمام اجزای یاتاقان صلب فرض می شوند و از داده های مواد برای فولاد سازه ای استفاده می کنند.
اتصال بین غلتکها و قفس از طریق اتصالات لولا مدلسازی میشود، که تنها یک درجه آزادی چرخشی حول محورهای خود دارند ( محور y ). فرض بر این است که نژاد بیرونی به یک پایه ثابت و بدون هیچ گونه حرکت انتقالی یا چرخشی متصل است. مسابقه داخلی به یک شفت با سرعت زاویه ای 5000 دور در دقیقه متصل می شود. علاوه بر این، بار باربری 100 نیوتن بر روی مسابقه داخلی در جهت -z تأثیر می گذارد .
برای هر غلتک سفت و سخت، یک خط تماس با نژادهای داخلی و خارجی وجود دارد. با استفاده از تماس بدنه سفت و سخت با قابلیت اصطکاک، تعامل بین هر غلتک و نژادها به عنوان تماس های اصطکاکی مدل می شود. ضریب اصطکاک بین غلتک ها و نژادها 0.1 در نظر گرفته شده است .
یک مطالعه وابسته به زمان برای 0.06 ثانیه، که مربوط به پنج چرخه چرخش شفت یا مسابقه داخلی است، برای تجزیه و تحلیل دینامیک نژاد داخلی، قفس و غلتکها انجام میشود. نیروهای تماس و اصطکاک بین نژادها و غلتک ها نیز مورد مطالعه قرار می گیرند.
نتایج و بحث
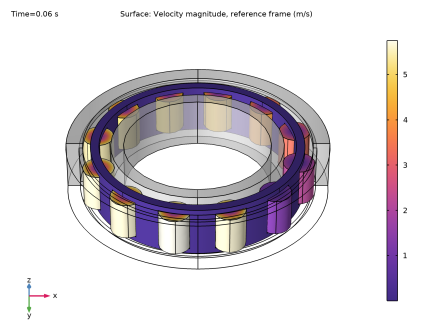
شکل 2 جابجایی را در مسابقه داخلی، غلتک ها و قفس نشان می دهد. از آنجایی که غلتک ها با نژاد داخلی در تماس هستند، چرخش نژاد درونی نیز منجر به چرخش غلتک ها و قفس می شود. شکل 3 سرعت غلتک ها و قفس را نشان می دهد. نیروی تماس بین غلتک ها و مسابقه داخلی نیز در اینجا رسم شده است.
از آنجایی که غلتکها میتوانند حول محورهای خود بچرخند، حرکت چرخشی اضافی را در اطراف محورهای خود نشان میدهند. این را می توان با ترسیم سرعت نسبی غلتک ها نسبت به قفس همانطور که در شکل 4 نشان داده شده است، مشاهده کرد .
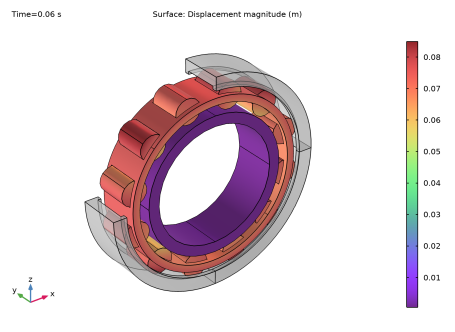
شکل 2: جابجایی اجزای مختلف در یاتاقان غلتکی استوانه ای در t = 0.06 ثانیه.

شکل 3: سرعت غلتک ها و قفس در t = 0.06 ثانیه. نمودار پیکان نیروی تماس بین غلتک ها و مسابقه داخلی را نشان می دهد.
شکل 4: سرعت نسبی غلتک ها نسبت به قفس در t = 0.06 ثانیه.
دینامیک سیستم توسط مسابقه داخلی که با سرعت زاویه ای ثابت 5000 دور در دقیقه حرکت می کند کنترل می شود. این حرکت به غلتک های تماسی و قفس منتقل می شود. شکل 5 سرعت زاویه ای مسابقه داخلی و قفس را نشان می دهد.
به دلیل تماس با مسابقه داخلی چرخان، جهت چرخش غلتکها بر خلاف جهت چرخش داخلی خواهد بود. سرعت زاویه ای سه غلتک نمونه در شکل 6 نشان داده شده است . نیروهای تماس و اصطکاک بین مسابقه داخلی و یکی از این غلتک های نمونه در شکل 7 نشان داده شده است . نرخ اتلاف انرژی اصطکاکی ناشی از تماس بین سه غلتک نمونه و مسابقه داخلی در شکل 8 نشان داده شده است . حرکت مداری نژاد درونی در شکل 9 نشان داده شده است .
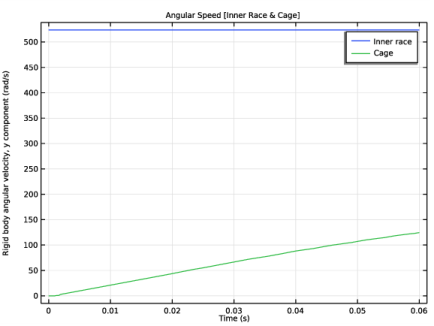
شکل 5: سرعت زاویه ای مسابقه درونی و قفس، به عنوان تابعی از زمان.
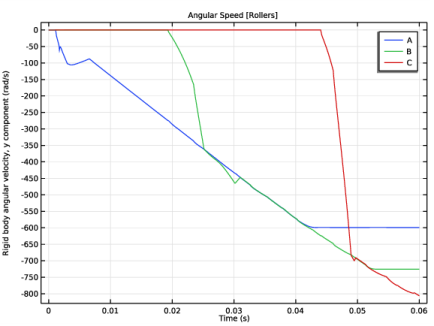
شکل 6: سرعت زاویه ای سه غلتک نمونه، به عنوان تابعی از زمان.
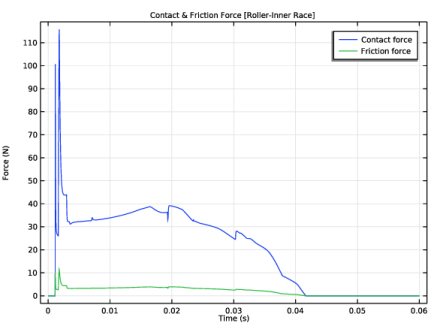
شکل 7: نیروهای تماس و اصطکاک بین یک غلتک نمونه و مسابقه داخلی، به عنوان تابعی از زمان.

شکل 8: نرخ اتلاف انرژی اصطکاکی بین سه غلتک نمونه و مسابقه داخلی، به عنوان تابعی از زمان.
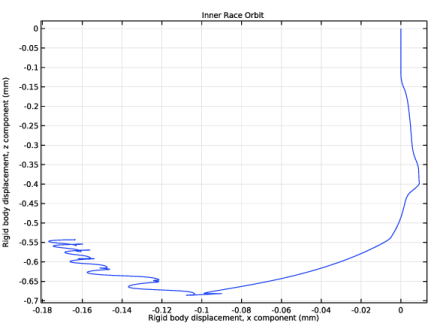
شکل 9: حرکت مداری نژاد درونی.
نکاتی درباره پیاده سازی COMSOL
• | در این مدل، همه اجزا به عنوان عناصر صلب با استفاده از گرههای Rigid Material مدلسازی میشوند که میتوانند به طور خودکار با استفاده از دکمه Create Rigid Domains در بخش Automated Model Setup در رابط فیزیک ایجاد شوند. |
• | گره های مشترک بین غلتک ها و قفس نیز می توانند به طور خودکار با استفاده از دکمه Create Joints در بخش Automated Model Setup در رابط فیزیکایجاد شوندایجاد اتصال خودکار نیاز به هندسه در حالت اسمبلی دارد و گره های جفت مرز هویت در تعاریف موجود باشد. |
مسیر کتابخانه برنامه: Multibody_Dynamics_Module/Tutorials/roller_bearing_dynamics
دستورالعمل مدلسازی
از منوی File ، New را انتخاب کنید .
جدید
در پنجره جدید ، روی  Model Wizard کلیک کنید .
Model Wizard کلیک کنید .
مدل جادوگر
1 | در پنجره Model Wizard ، روی |
2 | در درخت Select Physics ، Structural Mechanics>Multibody Dynamics (mbd) را انتخاب کنید . |
3 | روی افزودن کلیک کنید . |
4 |
5 | در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
6 |
تعاریف جهانی
پارامترهای 1
1 | در پنجره Model Builder ، در قسمت Global Definitions روی Parameters 1 کلیک کنید . |
2 | در پنجره تنظیمات برای پارامترها ، بخش پارامترها را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل roller_bearing_dynamics_parameters.txt دوبار کلیک کنید . |
اگر نمی خواهید هندسه را وارد کنید و انتخاب ایجاد کنید، می توانید دنباله هندسه را از مدل ذخیره شده بارگیری کنید. در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Geometry 1 کلیک راست کرده و Insert Sequence را انتخاب کنید . به پوشه Application Libraries مدل بروید و روی فایل roller_bearing_dynamics.mph دوبار کلیک کنید . سپس می توانید به بخش تعاریف زیر بروید.
برای وارد کردن هندسه و ایجاد انتخاب از ابتدا، اینجا را ادامه دهید.
هندسه 1
واردات 1 (imp1)
1 | در پنجره Model Builder ، گره Component 1 (comp1)>Geometry 1 را گسترش دهید . |
2 | روی Geometry 1 کلیک راست کرده و Import را انتخاب کنید . |
3 | در پنجره تنظیمات برای واردات ، بخش واردات را پیدا کنید . |
4 |
5 | به پوشه Application Libraries مدل بروید و روی فایل roller_bearing_dynamics.mphbin دوبار کلیک کنید . |
6 |
قفس
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب صریح ، Cage را در قسمت متن برچسب تایپ کنید . |
3 | در شیء imp1(2) فقط دامنه 1 را انتخاب کنید. |
4 | قسمت Color را پیدا کنید . از لیست رنگ ، رنگ 18 را انتخاب کنید . |
5 |
نژادها
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب صریح ، Races را در قسمت متن برچسب تایپ کنید . |
3 | در شیء imp1(1) فقط دامنه 1 را انتخاب کنید. |
4 | در شیء imp1(15) ، فقط دامنههای 1-4 را انتخاب کنید. |
5 | قسمت Color را پیدا کنید . از فهرست رنگ ، هیچکدام یا – اگر از دسکتاپ چند پلتفرمی استفاده میکنید – سفارشی را انتخاب کنید . در دسکتاپ cross-platform، روی دکمه Color کلیک کنید . |
6 | روی تعریف رنگ های سفارشی کلیک کنید . |
7 | مقادیر RGB را به ترتیب 128، 128 و 128 قرار دهید. |
8 | روی افزودن به رنگ های سفارشی کلیک کنید . |
9 | روی نمایش تنها پالت رنگ یا تأیید در دسکتاپ چند پلتفرمی کلیک کنید . |
10 |
غلتک
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب مکمل ، Rollers را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Input Entities را پیدا کنید . |
4 | در کادر محاورهای افزودن ، در فهرست انتخابها برای معکوس کردن ، Cage and Races را انتخاب کنید . |
5 | روی OK کلیک کنید . |
6 | در پنجره تنظیمات برای انتخاب مکمل ، قسمت Color را پیدا کنید . |
7 | از لیست Color ، رنگ 3 را انتخاب کنید . |
8 |
قفس و غلتک
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب اتحادیه ، Cage & Rollers را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Input Entities را پیدا کنید . |
4 | در کادر محاورهای افزودن ، در فهرست انتخابها برای افزودن ، Cage and Rollers را انتخاب کنید . |
5 | روی OK کلیک کنید . |
6 | در پنجره تنظیمات برای انتخاب اتحادیه ، روی Build Selected کلیک کنید . |
مرزهای قفس و غلتک
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب مجاور ، Cage & Rollers Boundaries را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Input Entities را پیدا کنید . |
4 | در کادر محاوره ای افزودن ، Cage & Rollers را در لیست انتخاب های ورودی انتخاب کنید . |
5 | روی OK کلیک کنید . |
6 | در پنجره تنظیمات برای انتخاب مجاور ، روی ساخت انتخاب شده کلیک کنید . |
نژاد بیرونی
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب صریح ، Outer Race را در قسمت متن برچسب تایپ کنید . |
3 | در شیء imp1(15) ، فقط دامنههای 1-4 را انتخاب کنید. |
4 |
مرزهای نژاد بیرونی
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب مجاور ، مرزهای نژاد خارجی را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Input Entities را پیدا کنید . |
4 | در کادر محاورهای افزودن ، مسابقه خارجی را در لیست انتخابهای ورودی انتخاب کنید . |
5 | روی OK کلیک کنید . |
6 | در پنجره تنظیمات برای انتخاب مجاور ، بخش Entities خروجی را پیدا کنید . |
7 | کادر داخلی مرزها را انتخاب کنید . |
8 |
مرزها بدون نژاد بیرونی
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب مکمل ، Boundaries without Outer Race را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Geometric Entity Level را پیدا کنید . از لیست Level ، Boundary را انتخاب کنید . |
4 | قسمت Input Entities را پیدا کنید . |
5 | در کادر محاورهای افزودن ، مرزهای نژاد خارجی را در فهرست انتخابها برای معکوس کردن انتخاب کنید . |
6 | روی OK کلیک کنید . |
7 | در پنجره تنظیمات برای انتخاب مکمل ، روی ساخت انتخاب شده کلیک کنید . |
فرم اتحادیه (فین)
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Form Union (fin) کلیک کنید . |
2 | در پنجره تنظیمات Form Union/Assembly ، بخش Form Union/Assembly را پیدا کنید . |
3 | از لیست Action ، Form an assembly را انتخاب کنید . |
4 |
برای تجسم بهتر، می توانید قسمت بالای مسابقه بیرونی را پنهان کنید.
5 |
6 | در نوار ابزار پنجره Graphics ، |
7 | در باله شی ، فقط دامنه 1 را انتخاب کنید. |
تعاریف
متغیرهای 1
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Definitions کلیک راست کرده و Variables را انتخاب کنید . |
2 | در پنجره تنظیمات برای متغیرها ، بخش متغیرها را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل roller_bearing_dynamics_variables.txt دوبار کلیک کنید . |
رمپ 1 (rm1)
1 | در نوار ابزار Home ، روی |
2 | در پنجره تنظیمات برای Ramp ، بخش Parameters را پیدا کنید . |
3 | در قسمت متن مکان ، 0[s] را تایپ کنید . |
4 | در قسمت متن شیب ، 1000 را تایپ کنید . |
5 | چک باکس Cutoff را انتخاب کنید . |
مواد را اضافه کنید
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Material بروید . |
3 | در درخت، Built-in>Structural steel را انتخاب کنید . |
4 | روی Add to Component در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
MULTIBODY DYNAMICS (MBD)
برای تولید گره های مواد سفت و سخت برای همه اجزاء به صورت زیر عمل کنید.
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Multibody Dynamics (mbd) کلیک کنید . |
2 | در پنجره تنظیمات برای Multibody Dynamics ، روی Physics Node Generation در گوشه سمت راست بالای بخش Automated Model Setup کلیک کنید . از منو، Create Rigid Domains را انتخاب کنید . |
مواد سفت و سخت 1: نژاد بیرونی
1 | در پنجره Model Builder ، گره Rigid Domains (All) را گسترش دهید ، سپس روی Rigid Material 1 کلیک کنید . |
2 | در پنجره تنظیمات برای مواد سفت و سخت ، در قسمت نوشتار برچسب ، Rigid Material 1: Outer Race را تایپ کنید . |
محدودیت ثابت 1
در نوار ابزار Physics ، روی Attributes کلیک کنید و Fixed Constraint را انتخاب کنید .
مواد سفت و سخت 3: قفس
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)> Multibody Dynamics (mbd)> Rigid Domains (All) روی Rigid Material 3 کلیک کنید . |
2 | در پنجره تنظیمات برای مواد سفت و سخت ، عبارت Rigid Material 3: Cage را در قسمت نوشتار Label تایپ کنید . |
جابجایی / چرخش تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای جابجایی/چرخش تجویز شده ، قسمت جابجایی تجویز شده در مرکز چرخش را پیدا کنید . |
3 | کادر بررسی تجویز شده در جهت y را انتخاب کنید . |
4 | بخش چرخش تجویز شده را پیدا کنید . از لیست By ، چرخش محدود را انتخاب کنید . |
5 | تیک گزینه Constrain rotation حول محور x را انتخاب کنید . |
6 | تیک گزینه Constrain rotation حول محور z را انتخاب کنید . |
مواد سفت و سخت 6: مسابقه درونی
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)> Multibody Dynamics (mbd)> Rigid Domains (All) روی Rigid Material 6 کلیک کنید . |
2 | در پنجره تنظیمات برای مواد سفت و سخت ، عبارت Rigid Material 6: Inner Race را در قسمت نوشتار Label تایپ کنید . |
جابجایی / چرخش تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای جابجایی/چرخش تجویز شده ، قسمت جابجایی تجویز شده در مرکز چرخش را پیدا کنید . |
3 | کادر بررسی تجویز شده در جهت y را انتخاب کنید . |
4 | بخش چرخش تجویز شده را پیدا کنید . از لیست By ، چرخش تجویز شده را انتخاب کنید . |
5 | بردار Ω را به صورت مشخص کنید |
0 | ایکس |
1 | y |
0 | z |
6 | در قسمت متن φ 0 ، omega*t را تایپ کنید . |
مواد سفت و سخت 6: مسابقه درونی
در پنجره Model Builder ، روی Rigid Material 6: Inner Race کلیک کنید .
نیروی کاربردی 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره Settings for Applied Force ، بخش Applied Force را پیدا کنید . |
3 | بردار F را به صورت مشخص کنید |
0 | ایکس |
0 | y |
-load*rm1(t) | z |
برای ایجاد گره های مفصل لولا بین غلتک ها و قفس به صورت زیر عمل کنید .
4 | در پنجره Model Builder ، روی Multibody Dynamics (mbd) کلیک کنید . |
5 | در پنجره تنظیمات برای Multibody Dynamics ، روی Physics Node Generation در گوشه سمت راست بالای بخش Automated Model Setup کلیک کنید . از منو، Create Joints را انتخاب کنید . |
تماس بدنه صلب 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای تماس با بدن سفت ، بخش منبع را پیدا کنید . |
3 | از لیست Source ، Rigid Material 2 را انتخاب کنید . |
4 | از لیست پارامترهای Shape ، User defined را انتخاب کنید . |
5 | در قسمت متن r s را تایپ کنید . |
6 | از فهرست مرکز ، Centroid of source را انتخاب کنید . |
7 | قسمت مقصد را پیدا کنید . از لیست مقصد ، Rigid Material 1: Outer Race را انتخاب کنید . |
8 | از لیست پارامترهای Shape ، User defined را انتخاب کنید . |
9 | در قسمت متن r d ، ro را تایپ کنید . |
10 | از لیست مرکز ، Centroid مقصد را انتخاب کنید . |
11 | کادر بررسی استفاده از مرزها برای تماس را انتخاب کنید . |
12 | قسمت تنظیمات تماس را پیدا کنید . در قسمت متن f p ، fp را تایپ کنید . |
13 | در قسمت متن τ n ، 1[ms]*10 را تایپ کنید . |
اصطکاک 1
1 | در نوار ابزار فیزیک ، روی |
2 | در پنجره تنظیمات برای اصطکاک ، قسمت اصطکاک را پیدا کنید . |
3 | در قسمت متن μ ، mu را تایپ کنید . |
4 | در قسمت متن v 0 ، mbd.diag*1e-3[1/s]*10 را تایپ کنید . |
تماس با مسابقه غلتکی بیرونی
به طور مشابه یازده گره تماس با بدنه سفت و سخت دیگر را بین غلتکها و نژاد بیرونی با کپی کردن Rigid Body Contact 1 و تنظیم مجدد ورودیها با استفاده از اطلاعات ارائه شده در جدول زیر ایجاد کنید.
نام | منبع | مقصد |
تماس بدنه سفت و سخت 2 | مواد سفت و سخت 4 | مواد سفت و سخت 1: نژاد بیرونی |
تماس بدنه سفت و سخت 3 | مواد سفت و سخت 5 | مواد سفت و سخت 1: نژاد بیرونی |
تماس بدنه سفت و سخت 4 | مواد سفت و سخت 7 | مواد سفت و سخت 1: نژاد بیرونی |
تماس بدنه سفت و سخت 5 | مواد سفت و سخت 8 | مواد سفت و سخت 1: نژاد بیرونی |
تماس بدنه صلب 6 | مواد سفت و سخت 9 | مواد سفت و سخت 1: نژاد بیرونی |
تماس بدنه سفت و سخت 7 | مواد سفت و سخت 10 | مواد سفت و سخت 1: نژاد بیرونی |
تماس بدنه سفت و سخت 8 | مواد سفت و سخت 11 | مواد سفت و سخت 1: نژاد بیرونی |
تماس بدنه سفت و سخت 9 | مواد سفت و سخت 12 | مواد سفت و سخت 1: نژاد بیرونی |
تماس بدنه سفت و سخت 10 | مواد سفت و سخت 13 | مواد سفت و سخت 1: نژاد بیرونی |
تماس بدنه سخت 11 | مواد سفت و سخت 14 | مواد سفت و سخت 1: نژاد بیرونی |
تماس بدنه سخت 12 | مواد سفت و سخت 15 | مواد سفت و سخت 1: نژاد بیرونی |
تماس بدنه صلب 1، تماس بدنه صلب 10، تماس با بدن صلب 11، تماس با بدن سفت و سخت 12، تماس با بدن صلب 2، تماس با بدن سفت و سخت 3، تماس با بدن سفت و سخت 4، تماس با بدن سفت و سخت 5، تماس با بدن صلب 6، تماس با بدن سفت و سخت 7، کنتاکت بدنه سفت و سخت 8، کنتاکت بدنه صلب 9
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) ، Ctrl کلیک کنید تا Rigid Body Contact 1 , Rigid Body Contact 2 , Rigid Body Contact 3 , Rigid Body Contact 4 , Rigid Body Contact 5 , Rigid را انتخاب کنید. تماس بدنه 6 , کنتاکت بدن سفت و سخت 7 , کنتاکت بدن سفت و سخت 8 , صلب تماس بدنه 9 ، تماس با بدن سفت و سخت 10 ، تماس با بدن صلب 11 ، و تماس با بدن سفت و سخت 12 . |
2 | کلیک راست کرده و Group را انتخاب کنید . |
تماس با مسابقه غلتکی بیرونی
در پنجره تنظیمات گروه ، Roller-Outer Race Contact را در قسمت نوشتار Label تایپ کنید .
با کپی کردن Roller-Outer Race Contact و تنظیم مجدد مقادیر ورودی، گرههای تماس سفت و سخت بدن را بین غلطکها و مسابقه داخلی اضافه کنید .
تماس غلتکی-داخلی مسابقه
1 | روی Roller-Outer Race Contact کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه ، Roller-Inner Race Contact را در قسمت نوشتاری Label تایپ کنید . |
تماس بدنه سفت و سخت 13
1 | در پنجره Model Builder ، گره Roller-Inner Race Contact را گسترش دهید ، سپس روی Rigid Body Contact 13 کلیک کنید . |
2 | در پنجره تنظیمات برای مخاطب سفت و سخت ، قسمت مقصد را پیدا کنید . |
3 | از لیست مقصد ، Rigid Material 6: Inner Race را انتخاب کنید . |
4 | کادر تیک Use inside booundaries for contact را پاک کنید . |
5 | در قسمت متن r d ، ri را تایپ کنید . |
تماس غلتکی-داخلی مسابقه
1 | مشابه تغییرات انجام شده برای Rigid Body Contact 13 ، ورودی های یازده گره دیگر Rigid Body Contact را با استفاده از اطلاعات ارائه شده در جدول زیر بازنشانی کنید. |
نام | منبع | مقصد |
تماس بدنه صلب 14 | مواد سفت و سخت 4 | مواد سفت و سخت 6: مسابقه درونی |
تماس بدنه صلب 15 | مواد سفت و سخت 5 | مواد سفت و سخت 6: مسابقه درونی |
تماس بدنه سخت 16 | مواد سفت و سخت 7 | مواد سفت و سخت 6: مسابقه درونی |
تماس بدنه سفت و سخت 17 | مواد سفت و سخت 8 | مواد سفت و سخت 6: مسابقه درونی |
تماس بدنه سفت و سخت 18 | مواد سفت و سخت 9 | مواد سفت و سخت 6: مسابقه درونی |
تماس بدنه سفت و سخت 19 | مواد سفت و سخت 10 | مواد سفت و سخت 6: مسابقه درونی |
تماس با بدن سفت و سخت 20 | مواد سفت و سخت 11 | مواد سفت و سخت 6: مسابقه درونی |
تماس با بدن سفت و سخت 21 | مواد سفت و سخت 12 | مواد سفت و سخت 6: مسابقه درونی |
تماس با بدن سفت و سخت 22 | مواد سفت و سخت 13 | مواد سفت و سخت 6: مسابقه درونی |
تماس با بدن سفت و سخت 23 | مواد سفت و سخت 14 | مواد سفت و سخت 6: مسابقه درونی |
تماس با بدن سفت و سخت 24 | مواد سفت و سخت 15 | مواد سفت و سخت 6: مسابقه درونی |
به منظور تجسم حرکت سیستم نسبت به قاب قفس، می توانید از گزینه تعریف یک قاب مرجع موجود در رابط Multibody Dynamics استفاده کنید و متغیرهای پس پردازش را برای سرعت با توجه به قاب مرجع رسم کنید.
2 | در پنجره Model Builder ، روی Multibody Dynamics (mbd) کلیک کنید . |
3 | در پنجره تنظیمات برای Multibody Dynamics ، برای گسترش بخش Results کلیک کنید . |
4 | از لیست قاب مرجع تعیین بدن ، مواد سفت و سخت 3: قفس را انتخاب کنید . |
مش 1
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Mesh 1 کلیک کنید . |
2 | در پنجره تنظیمات مش ، قسمت Physics-Controlled Mesh را پیدا کنید . |
3 | از فهرست اندازه عنصر ، Finer را انتخاب کنید . |
4 |
مطالعه 1
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در بخش مطالعه 1 ، روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
3 | در قسمت متن زمان خروجی ، محدوده (0,T/500,5*T) را تایپ کنید . |
راه حل 1 (sol1)
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره Model Builder ، گره Solution 1 (sol1) را گسترش دهید . |
3 | در پنجره Model Builder ، گره Study 1>Solver Configurations>Solution 1 (sol1)>Time-Dependent Solver 1 را گسترش دهید ، سپس روی Fully Coupled 1 کلیک کنید . |
4 | در پنجره Settings for Fully Coupled ، برای گسترش بخش Method and Termination کلیک کنید . |
5 | در قسمت حداکثر تعداد تکرار ، 15 را تایپ کنید . |
6 | در پنجره Model Builder ، در قسمت Study 1>Solver Configurations>Solution 1 (sol1) روی Time-Dependent Solver 1 کلیک کنید . |
7 | در پنجره تنظیمات برای حل وابسته به زمان ، برای گسترش بخش Time Steping کلیک کنید . |
8 | از لیست مراحل انجام شده توسط حل کننده ، Intermediate را انتخاب کنید . |
9 | در نوار ابزار مطالعه ، |
نتایج
برای ترسیم جابجایی سیستم همانطور که در شکل 2 نشان داده شده است، دستورالعمل های زیر را دنبال کنید .
جابجایی (mbd)
1 | در پنجره Model Builder ، در قسمت Results، روی Displacement (mbd) کلیک کنید . |
2 | در پنجره Settings for 3D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | چک باکس Propagate hiding to low dimensions را انتخاب کنید . |
4 | در پنجره Model Builder ، گره Displacement (mbd) را گسترش دهید . |
انتخاب 1
1 | در پنجره Model Builder ، Results>Displacement (mbd)>Surface node را گسترش دهید. |
2 | روی Surface کلیک راست کرده و Selection را انتخاب کنید . |
3 | در پنجره تنظیمات برای انتخاب ، قسمت انتخاب را پیدا کنید . |
4 | از لیست انتخاب ، Boundaries without Outer Race را انتخاب کنید . |
سطح 2
1 | در پنجره Model Builder ، روی Surface کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای Surface ، برای گسترش بخش عنوان کلیک کنید . |
3 | از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
4 | قسمت Coloring and Style را پیدا کنید . از لیست Coloring ، Uniform را انتخاب کنید . |
5 | از لیست رنگ ، خاکستری را انتخاب کنید . |
شفافیت 1
روی Surface 2 کلیک راست کرده و Transparency را انتخاب کنید .
انتخاب 1
1 | در پنجره تنظیمات برای انتخاب ، قسمت انتخاب را پیدا کنید . |
2 | برای انتخاب دکمه ضامن |
3 | از لیست انتخاب ، مرزهای نژاد بیرونی را انتخاب کنید . |
4 | در نوار ابزار Displacement (mbd) ، روی |
برای رسم نیروی تماس و سرعت، دستورالعمل های زیر را دنبال کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 3 مطابقت داشته باشد .
نیروی تماس و سرعت
1 | در پنجره Model Builder ، در زیر Results روی Velocity (mbd) کلیک کنید . |
2 | در پنجره تنظیمات گروه طرح سه بعدی ، Contact Force & Velocity را در قسمت نوشتار Label تایپ کنید . |
3 | برای گسترش بخش انتخاب کلیک کنید . قسمت Plot Settings را پیدا کنید . از لیست View ، نمای جدید را انتخاب کنید . |
خط پیکان
1 | در پنجره Model Builder ، گره Contact Force & Velocity را گسترش دهید . |
2 | روی Results>Contact Force & Velocity>Arrow Line کلیک راست کرده و Delete را انتخاب کنید . |
جلد
1 | در پنجره Model Builder ، در بخش Results>Contact Force & Velocity روی Volume کلیک کنید . |
2 | در پنجره تنظیمات برای حجم ، قسمت Coloring and Style را پیدا کنید . |
3 | از لیست Coloring ، Uniform را انتخاب کنید . |
4 | از لیست رنگ ، خاکستری را انتخاب کنید . |
5 | برای گسترش بخش عنوان کلیک کنید . از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
شفافیت 1
روی Volume کلیک راست کرده و Transparency را انتخاب کنید .
انتخاب 1
1 | روی Volume کلیک راست کرده و Selection را انتخاب کنید . |
2 | در پنجره تنظیمات برای انتخاب ، قسمت انتخاب را پیدا کنید . |
3 | از لیست انتخاب ، نژادها را انتخاب کنید . |
4 | در لیست، 2 و 3 را انتخاب کنید . |
5 |
6 | فقط دامنه های 1، 4 و 9 را انتخاب کنید. |
سطح 1
1 | در پنجره Model Builder ، روی Contact Force & Velocity کلیک راست کرده و Surface را انتخاب کنید . |
2 | در پنجره تنظیمات برای Surface ، بخش Expression را پیدا کنید . |
3 | در قسمت متن Expression ، mbd.vel را تایپ کنید . |
4 | قسمت Coloring and Style را پیدا کنید . |
5 | در کادر محاوره ای Color Table ، Thermal>HeatCameraLight را در درخت انتخاب کنید. |
6 | روی OK کلیک کنید . |
تغییر شکل 1
1 | روی Surface 1 کلیک راست کرده و Deformation را انتخاب کنید . |
2 | در پنجره تنظیمات برای تغییر شکل ، بخش مقیاس را پیدا کنید . |
3 | چک باکس Scale factor را انتخاب کنید . در فیلد متن مرتبط، 1 را تایپ کنید . |
انتخاب 1
1 | در پنجره Model Builder ، روی Surface 1 کلیک راست کرده و Selection را انتخاب کنید . |
2 | در پنجره تنظیمات برای انتخاب ، قسمت انتخاب را پیدا کنید . |
3 | از لیست انتخاب ، Cage & Rollers Boundaries را انتخاب کنید . |
سطح پیکان 1
1 | در پنجره Model Builder ، روی Contact Force & Velocity کلیک راست کرده و Arrow Surface را انتخاب کنید . |
2 | در پنجره تنظیمات برای Arrow Surface ، بخش Expression را پیدا کنید . |
3 | در قسمت متن X جزء ، Fnx را تایپ کنید . |
4 | در قسمت متنی جزء Y ، Fny را تایپ کنید . |
5 | در قسمت متنی کامپوننت Z ، Fnz را تایپ کنید . |
6 | چک باکس Description را انتخاب کنید . در فیلد متن مرتبط، نیروی تماس (N) را تایپ کنید . |
7 | قسمت Coloring and Style را پیدا کنید . |
8 | چک باکس Scale factor را انتخاب کنید . در قسمت متن مرتبط، 5e-4 را تایپ کنید . |
9 | از لیست رنگ ، سبز را انتخاب کنید . |
تغییر شکل 1
1 | روی Arrow Surface 1 کلیک راست کرده و Deformation را انتخاب کنید . |
2 | در پنجره تنظیمات برای تغییر شکل ، بخش مقیاس را پیدا کنید . |
3 | چک باکس Scale factor را انتخاب کنید . در فیلد متن مرتبط، 1 را تایپ کنید . |
انتخاب 1
1 | در پنجره Model Builder ، روی Arrow Surface 1 کلیک راست کرده و Selection را انتخاب کنید . |
2 | در پنجره تنظیمات برای انتخاب ، قسمت انتخاب را پیدا کنید . |
3 | از لیست انتخاب ، Cage & Rollers Boundaries را انتخاب کنید . |
4 | در نوار ابزار Contact Force & Velocity ، روی |
دستورالعمل های زیر را برای رسم سرعت با توجه به قاب قفس دنبال کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 4 مطابقت داشته باشد .
سرعت [قاب قفس]
1 | در پنجره Model Builder ، روی Contact Force & Velocity کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح سه بعدی ، Velocity [قاب قفس] را در قسمت نوشتار برچسب تایپ کنید . |
سطح 1
1 | در پنجره Model Builder ، گره Velocity [Cage Frame] را گسترش دهید ، سپس روی Surface 1 کلیک کنید . |
2 | در پنجره تنظیمات برای Surface ، بخش Expression را پیدا کنید . |
3 | در قسمت متن Expression ، mbd.vel_ref را تایپ کنید . |
سطح پیکان 1
در پنجره Model Builder ، در Results>Velocity [Cage Frame] روی Arrow Surface 1 کلیک راست کرده و Delete را انتخاب کنید .
سرعت [قاب قفس]
برای ترسیم سرعت زاویه ای مسابقه داخلی و قفس، دستورالعمل های زیر را دنبال کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 5 مطابقت داشته باشد .
سرعت زاویه ای [مسابقه درونی و قفس]
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Angular Speed [Inner Race & Cage] را در قسمت نوشتار Label تایپ کنید . |
3 | برای گسترش بخش عنوان کلیک کنید . از لیست نوع عنوان ، Label را انتخاب کنید . |
جهانی 1
1 | روی Angular Speed [Inner Race & Cage] کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rd6.th_ty | راد/ثانیه | سرعت زاویه ای جسم صلب، جزء y |
mbd.rd3.th_ty | راد/ثانیه | سرعت زاویه ای جسم صلب، جزء y |
4 | برای گسترش بخش Legends کلیک کنید . از فهرست Legends ، Manual را انتخاب کنید . |
5 | در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
مسابقه درونی |
قفس |
6 | در نوار ابزار Angular Speed [Inner Race & Cage] ، روی |
برای ترسیم سرعت زاویه ای غلتک ها، دستورالعمل های زیر را دنبال کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 6 مطابقت داشته باشد .
سرعت زاویه ای [غلتک]
1 | در پنجره Model Builder ، روی Angular Speed [Inner Race & Cage] کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Angular Speed [Rollers] را در قسمت نوشتار برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Angular Speed [Rollers] را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rd11.th_ty | راد/ثانیه | سرعت زاویه ای جسم صلب، جزء y |
mbd.rd15.th_ty | راد/ثانیه | سرعت زاویه ای جسم صلب، جزء y |
mbd.rd10.th_ty | راد/ثانیه | سرعت زاویه ای جسم صلب، جزء y |
4 | در نوار ابزار Angular Speed [Rollers] ، روی |
5 | قسمت Legends را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
آ |
ب |
سی |
6 | در نوار ابزار Angular Speed [Rollers] ، روی |
دستورالعمل های زیر را برای ترسیم نیروی تماس و اصطکاک بین غلتک و مسابقه داخلی دنبال کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 7 مطابقت داشته باشد .
نیروی تماس و اصطکاک [مسابقه غلتکی- درونی]
1 | در پنجره Model Builder ، روی Angular Speed [Rollers] کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، نیروی تماس و اصطکاک [Roller-Inner Race] را در قسمت نوشتار برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Contact & Friction Force [Roller-Inner Race] را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 |
4 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rbc20.Fn | ن | نیروی تماس |
mbd.rbc20.ff | ن | نیروی اصطکاک |
5 | قسمت Legends را پیدا کنید . از لیست Legends ، Automatic را انتخاب کنید . |
نیروی تماس و اصطکاک [مسابقه غلتکی- درونی]
1 | در پنجره Model Builder ، روی Contact & Friction Force [Roller-Inner Race] کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | کادر بررسی برچسب محور y را انتخاب کنید . در قسمت متن مرتبط، Force (N) را تایپ کنید . |
4 | در نوار ابزار Contact & Friction Force [Roller-Inner Race] ، روی |
دستورالعمل های زیر را دنبال کنید تا میزان اتلاف انرژی اصطکاکی بین غلتک ها و مسابقه داخلی را ترسیم کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 8 مطابقت داشته باشد .
نرخ اتلاف انرژی اصطکاکی [مسابقه غلتکی- درونی]
1 | روی Contact & Friction Force [Roller-Inner Race] کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، نرخ اتلاف انرژی اصطکاکی [Roller-Inner Race] را در قسمت نوشتار برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره نرخ اتلاف انرژی اصطکاکی [Roller-Inner Race] را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 |
4 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rbc20.Qf | دبلیو | سرعت اتلاف انرژی اصطکاکی |
mbd.rbc24.Qf | دبلیو | سرعت اتلاف انرژی اصطکاکی |
mbd.rbc19.Qf | دبلیو | سرعت اتلاف انرژی اصطکاکی |
5 | قسمت Legends را پیدا کنید . از فهرست Legends ، Manual را انتخاب کنید . |
6 | در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
آ |
ب |
سی |
نرخ اتلاف انرژی اصطکاکی [مسابقه غلتکی- درونی]
1 | در پنجره Model Builder ، روی نرخ اتلاف انرژی اصطکاکی [Roller-Inner Race] کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | کادر بررسی برچسب محور y را پاک کنید . |
4 | در نوار ابزار نرخ اتلاف انرژی اصطکاکی [Roller-Inner Race] ، روی |
برای ترسیم مدار درونی مسابقه، دستورالعمل های زیر را دنبال کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 9 مطابقت داشته باشد .
مدار مسابقه داخلی
1 | روی نرخ اتلاف انرژی اصطکاکی [Roller-Inner Race] کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Inner Race Orbit را در قسمت متن برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Inner Race Orbit را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 |
4 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rd6.w | میلی متر | جابجایی بدنه صلب، جزء z |
5 | قسمت Legends را پیدا کنید . تیک Show legends را پاک کنید . |
6 | قسمت x-Axis Data را پیدا کنید . از لیست Parameter ، Expression را انتخاب کنید . |
7 | در قسمت متن Expression ، mbd.rd6.u را تایپ کنید . |
8 | از لیست واحد ، mm را انتخاب کنید . |
مدار مسابقه داخلی
1 | در پنجره Model Builder ، روی Inner Race Orbit کلیک کنید . |
2 | در نوار ابزار Inner Race Orbit ، روی |
جابجایی (mbd)
1 | در نوار ابزار نتایج ، روی |
2 | در پنجره تنظیمات برای انیمیشن ، Displacement (mbd) را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Frames را پیدا کنید . در قسمت متنی Number of frames عدد 100 را تایپ کنید . |
نیروی تماس و سرعت
1 | روی Displacement (mbd) کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات انیمیشن ، Contact Force & Velocity را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Scene را پیدا کنید . از لیست موضوع ، نیروی تماس و سرعت را انتخاب کنید . |
سرعت [قاب قفس]
1 | روی Contact Force & Velocity کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات انیمیشن ، Velocity [Cage Frame] را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Scene را پیدا کنید . از لیست موضوع ، سرعت [ قاب قفس] را انتخاب کنید . |



