
مدل برآمده از سیستم تعلیق خودرو
معرفی
در این مثال، یک مدل تودهای از سیستم تعلیق خودرو با یازده درجه آزادی تحلیل میشود. گرههای Mass ، Spring و Damper رابط سیستم مکانیکی Lumped برای مدلسازی چرخها، از جمله سیستم تعلیق، و همچنین صندلیهای دارای سرنشین استفاده میشوند . بدنه خودرو با داشتن سه درجه آزادی، به عنوان یک بدنه سفت و سخت در رابط Multibody Dynamics مدل سازی شده است. گره منبع خارجی رابط سیستم مکانیکی توده ای و کوپلینگ چندفیزیکی اتصال ساختاری توده ای برای اتصال مدل MBD بدنه خودرو به مدل توده ای بقیه سیستم استفاده می شود.
یک تحلیل گذرا برای محاسبه حرکت وسیله نقلیه و سطوح ارتعاش صندلی برای یک نمایه جاده معین انجام میشود. داده های این مدل از Ref. 1 .
تعریف مدل
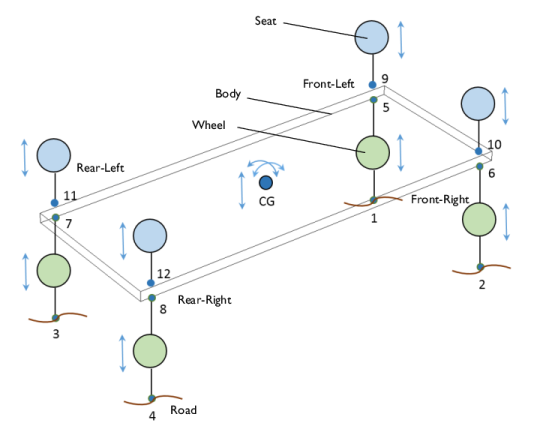
شکل 1: مدل تودهای سیستم تعلیق خودرو شامل چرخها، بدنه و صندلیها. یازده درجه آزادی سیستم و همچنین شماره گره سیستم ها نیز نشان داده شده است.
مدل توده ای سیستم تعلیق خودرو در شکل 1 نشان داده شده است . این مدل دارای سه جزء اصلی است:
• | چرخ (4 داف) |
• | صندلی (4 DOF) |
• | بدنه (3 داف) |
مدل سازی چرخ و صندلی
هر چرخ و صندلی فقط یک درجه آزادی به شکل جابجایی عمودی دارد و در رابط سیستم مکانیکی Lumped مدل شده است. در مجموع در مدل فول خودرو 4 چرخ و 4 صندلی وجود دارد. هر دو مؤلفه همانطور که در شکل 2 نشان داده شده است به عنوان یک زیر سیستم تعریف می شوند .
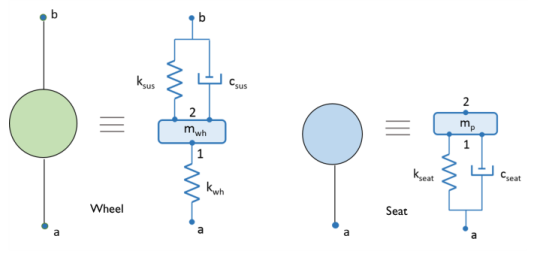
شکل 2: مدل توده ای چرخ و صندلی یک وسیله نقلیه.
مدل توده ای چرخ شامل موارد زیر است:
• | جرم و سفتی چرخ |
• | سفتی و میرایی سیستم تعلیق خودرو |
مدل توده ای صندلی شامل موارد زیر است:
• | سفتی و میرایی یک صندلی |
• | جرم یک مسافر |
مدلسازی بدنه خودرو
بدنه خودرو دارای سه درجه آزادی است:
• | رول |
• | گام صدا |
• | بلند کن |
از آنجایی که بدنه دارای درجات آزادی چرخشی است، با استفاده از یک گره مواد صلب در رابط Multibody Dynamics به صورت سه بعدی مدلسازی میشود.
اتصال چرخ-بدنه و بدنه-صندلی
چرخها و صندلیهای خودرو در رابط سیستم مکانیکی Lumped مدلسازی میشوند در حالی که بدنه خودرو در رابط Multibody Dynamics مدلسازی میشود. به منظور اتصال چرخ-بدنه و بدنه-صندلی، از کوپلینگ Multiphysics Connection Lumped-Structure استفاده می شود. بدنه به عنوان یک عنصر منبع خارجی در مدل سیستم تودهای مدلسازی میشود. از طریق کوپلینگ چندفیزیکی اتصال ساختاری برآمده ، جابجایی به دست آمده از مدل بدنه خودرو MBD در نقاط اتصال در مدل توده ای استفاده می شود. به طور مشابه، نیروهای واکنش چرخ و صندلی به دست آمده از مدل توده ای در مدل بدنه خودرو MBD اعمال می شود.
نمایه جاده
پروفیل جاده به عنوان یک تابع موج مستطیلی با فرض یک سری دست اندازها در جاده مدل می شود. ارتفاع و عرض برآمدگی به ترتیب 4 سانتی متر و 7.5 سانتی متر در نظر گرفته شده است. همچنین خودرو با سرعت ثابت 40 کیلومتر بر ساعت در حال حرکت فرض شده است.
تحریک جاده به انتهای پایین چرخ ها تجویز می شود. در این مدل تنها چرخ های سمت چپ خودرو در مسیر ناهموار در حال حرکت فرض شده است.
پارامترهای مدل
پارامترهای مورد استفاده در مدل در جدول زیر آورده شده است:
شرح | نام | اصطلاح |
جرم بدنه خودرو | m_body | 670 کیلو گرم |
اینرسی در اطراف رول | من_غلت می کنم | 800 کیلوگرم · متر مربع |
اینرسی در اطراف زمین | من_پیچ | 1100 کیلوگرم · متر مربع |
توده چرخ ها | m_wh | 30 کیلوگرم |
انبوه مسافران | m_p | 120 کیلوگرم |
سفتی چرخ ها | k_wh | 175500 نیوتن بر متر |
سفتی فنرهای تعلیق | k_sus | 17500 نیوتن بر متر |
سفتی فنرهای صندلی | k_seat | 1750 نیوتن بر متر |
ویسکوزیته دمپرهای تعلیق | c_sus | 1460 Ns/m |
ویسکوزیته دمپرهای صندلی | ج_صندلی | 700 Ns/m |
پایه چرخ | r_wb | 1.9975 متر |
عرض مسیر | r_tw | 0.8025 متر |
نتایج و بحث
شکل 3 تحریک جاده را برای چرخ جلو چپ و عقب چپ خودرو نشان می دهد. تفاوت فاز بین تحریک چرخ جلو و عقب قابل مشاهده است.
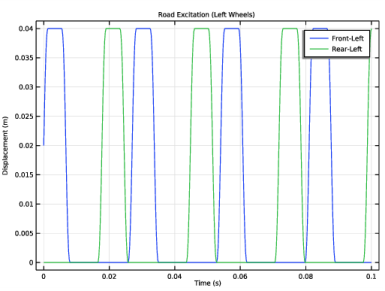
شکل 3: تحریک جاده برای چرخ های چپ وسیله نقلیه.
شکل 4 تاریخچه زمانی حرکت چرخش، گام و بالا رفتن وسیله نقلیه در مرکز ثقل ناشی از تحریک جاده در زیر چرخ های سمت چپ خودرو را نشان می دهد. می توان دید که چرخش رول بسیار بزرگتر از چرخش زمین برای تحریک جاده معین است. سرعت های متناظر برای حرکات رول، گام و بالا رفتن را می توان در شکل 5 مشاهده کرد . دو فرکانس مختلف، کم و زیاد، مربوط به فرکانس های طبیعی برای اجزای سیستم را می توان در نمودار سرعت مشاهده کرد.
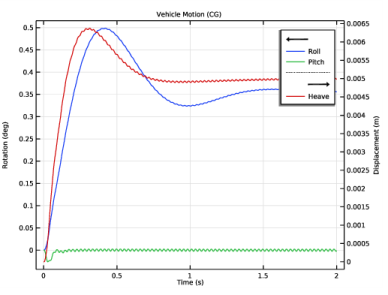
شکل 4: چرخش، گام، و حرکت وسیله نقلیه در مرکز ثقل.
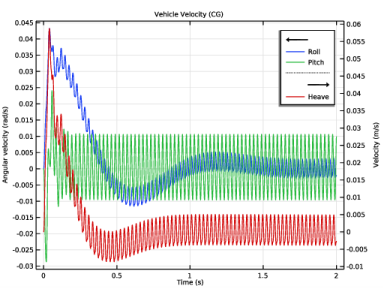
شکل 5: سرعت های وسیله نقلیه مربوط به حرکات رول، گام و بالا رفتن در مرکز ثقل.
شکل 6 و شکل 7 تاریخچه زمانی جابجایی و شتاب را در هر چهار مکان صندلی نشان می دهد.
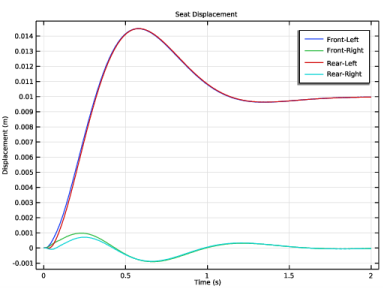
شکل 6: تاریخچه زمانی جابجایی صندلی.
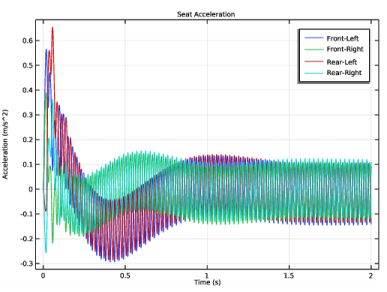
شکل 7: تاریخچه زمانی شتاب های صندلی.
شکل 8 و شکل 9 به ترتیب نیروهای وارد بر فنر و دمپر چرخ جلو چپ و صندلی را نشان می دهد. می توان مشاهده کرد که بزرگی نیرو در فنر و دمپر چرخ بسیار بزرگتر از یک صندلی است. دلیل این امر این واقعیت است که نیروی زیادی توسط اینرسی چرخ ها و بدنه خودرو جذب می شود به طوری که تنها کسری از نیرو از چرخ به صندلی منتقل می شود.
همچنین می توان متوجه شد که نیروهای موجود در چرخ دارای فرکانس ارتعاش هستند که همان فرکانس تحریک است، در حالی که نیروهای موجود در صندلی فرکانس ارتعاش بسیار کمتری دارند.
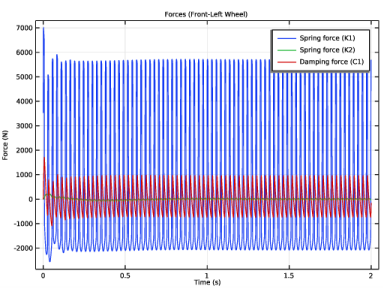
شکل 8: نیروهای وارد شده به فنرها و دمپر چرخ جلو سمت چپ.
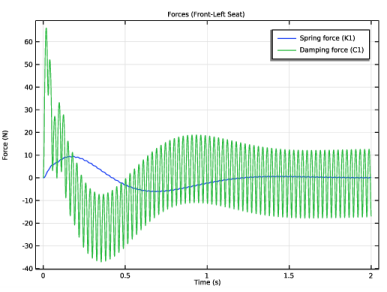
شکل 9: نیروها در فنر و دمپر صندلی جلو سمت چپ.
نکاتی درباره پیاده سازی COMSOL
• | Fixed Node گره پیش فرض رابط Lumped Mechanical System است . با این حال، اگر هیچ یک از گره های سیستم ثابت نباشد، می توان آن را غیرفعال کرد. |
• | برای استفاده مجدد از تعریف مدل یکپارچه چرخ و صندلی یک وسیله نقلیه، از یک گره Subsystem Definition برای تعریف جزء استفاده کنید. سپس، چندین بار از گرههای Subsystem Instance برای ایجاد بیش از یک نمونه از چرخها و صندلیها استفاده کنید. |
• | کوپلینگ multiphysics Connection Lumped-Structure و گره منبع خارجی را می توان برای اتصال یک مدل توزیع شده از یک جزء به مدل توده ای سیستم استفاده کرد. |
• | برای محدود کردن تعداد درجه آزادی بدنه خودرو به سه درجه، از گره فرعی جابجایی/چرخش تجویز شده گره مواد سفت و سخت استفاده می شود. |
• | برای وارد کردن مقادیر توده ای و اینرسی بدنه خودرو، از زیرگره Mass and Moment of Inertia گره Rigid Material استفاده می شود. |
ارجاع
1. SH زارع و م. عباسی، “کنترل نیمه فعال ارتعاش سیستم تعلیق یازده درجه آزادی با استفاده از مدل معکوس عصبی میراگرهای مغناطیسی،” مجله علم و فناوری مکانیک ، ش. 26، شماره 8، صفحات 2459-2467، 2012.
مسیر کتابخانه برنامه: Multibody_Dynamics_Module/Automotive_and_Aerospace/lumped_vehicle_suspension_system
دستورالعمل مدلسازی
از منوی File ، New را انتخاب کنید .
جدید
در پنجره جدید ، روی  Model Wizard کلیک کنید .
Model Wizard کلیک کنید .
مدل جادوگر
1 | در پنجره Model Wizard ، روی |
2 | در درخت Select Physics ، Structural Mechanics> Lumped Mechanical System (lms) را انتخاب کنید . |
3 | روی افزودن کلیک کنید . |
4 | در درخت Select Physics ، Structural Mechanics>Multibody Dynamics (mbd) را انتخاب کنید . |
5 | روی افزودن کلیک کنید . |
6 |
7 | در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
8 |
تعاریف جهانی
پارامترهای 1
1 | در پنجره Model Builder ، در قسمت Global Definitions روی Parameters 1 کلیک کنید . |
2 | در پنجره تنظیمات برای پارامترها ، بخش پارامترها را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل lumped_vehicle_suspension_system_parameters.txt دوبار کلیک کنید . |
از یک تابع شکل موج برای تعریف نمایه جاده استفاده کنید.
شکل موج 1 (wv1)
1 | در نوار ابزار Home ، روی |
2 | در پنجره تنظیمات برای شکل موج ، بخش پارامترها را پیدا کنید . |
3 | از لیست Type ، مربع را انتخاب کنید . |
4 | در قسمت متنی Size of transition zone ، tb/10 را تایپ کنید . |
5 | در قسمت متنی Duty cycle ، 0.25 را تایپ کنید . |
6 | در قسمت متن دوره ، tb را تایپ کنید . |
7 | در قسمت متن Amplitude ، hb/2 را تایپ کنید . |
شکل موج 2 (wv2)
1 | روی Waveform 1 (wv1) کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای شکل موج ، بخش پارامترها را پیدا کنید . |
3 | در قسمت Phase text، -2*pi/tb*td را تایپ کنید . |
هندسه بدنه خودرو را ایجاد کنید و نقاط اتصال آن را برای چرخ ها و صندلی ها مشخص کنید.
هندسه 1
بلوک 1 (blk1)
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای Block ، قسمت Size and Shape را پیدا کنید . |
3 | در قسمت متن Width ، 2*r_wb را تایپ کنید . |
4 | در قسمت Depth text 2*r_tw را تایپ کنید . |
5 | در قسمت متن ارتفاع ، r_wb/20 را تایپ کنید . |
6 | قسمت Position را پیدا کنید . از لیست پایه ، مرکز را انتخاب کنید . |
7 |
سیستم مکانیکی برآمده (LMS)
گره ثابت 1 (fix1)
در پنجره Model Builder ، در قسمت Component 1 (comp1)> Lumped Mechanical System (lms) روی Fixed Node 1 (fix1) راست کلیک کرده و Disable را انتخاب کنید .
مدل توده ای چرخ و صندلی را با استفاده از گره Subsystem Definition تعریف کنید .
تعریف زیرسیستم: چرخ
1 | در پنجره Model Builder ، روی Lumped Mechanical System (lms) کلیک راست کرده و Subsystem Definition را انتخاب کنید . |
2 | در پنجره تنظیمات برای Subsystem Definition ، Subsystem Definition: Wheel را در قسمت نوشتار Label تایپ کنید . |
بهار 1 (K1)
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Spring ، بخش Node Connections را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
برچسب | نام گره ها |
p1 | آ |
p2 | 1 |
4 | قسمت Component Parameters را پیدا کنید . در قسمت متن k ، k_wh را تایپ کنید . |
جرم 1 (M1)
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Mass ، بخش Node Connections را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
برچسب | نام گره ها |
p1 | 1 |
4 | قسمت Component Parameters را پیدا کنید . در قسمت متن m ، m_wh را تایپ کنید . |
Spring 2 (K2)
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Spring ، بخش Node Connections را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
برچسب | نام گره ها |
p1 | 2 |
p2 | ب |
4 | قسمت Component Parameters را پیدا کنید . در قسمت متن k ، k_sus را تایپ کنید . |
دمپر 1 (C1)
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Damper ، بخش Node Connections را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
برچسب | نام گره ها |
p1 | 2 |
p2 | ب |
4 | قسمت Component Parameters را پیدا کنید . در قسمت متن c ، c_sus را تایپ کنید . |
تعریف زیرسیستم: صندلی
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Subsystem Definition ، Subsystem Definition: Seat را در قسمت نوشتار Label تایپ کنید . |
سطر دوم جدول را حذف کنید.
بهار 1 (K1)
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Spring ، بخش Node Connections را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
برچسب | نام گره ها |
p1 | آ |
p2 | 1 |
4 | قسمت Component Parameters را پیدا کنید . در قسمت متن k ، k_seat را تایپ کنید . |
دمپر 1 (C1)
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Damper ، بخش Node Connections را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
برچسب | نام گره ها |
p1 | آ |
p2 | 1 |
4 | قسمت Component Parameters را پیدا کنید . در قسمت متن c ، c_seat را تایپ کنید . |
جرم 1 (M1)
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Mass ، بخش Node Connections را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
برچسب | نام گره ها |
p1 | 1 |
4 | قسمت Component Parameters را پیدا کنید . در قسمت متن m ، m_p را تایپ کنید . |
گره رایگان 1 (fr1)
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Free Node ، بخش Node Connections را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
برچسب | نام گره |
p1 | 2 |
اکنون تحریک جاده را برای هر چهار چرخ وسیله نقلیه تعریف کنید.
گره جابجایی: جلو-چپ
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای گره جابجایی ، Displacement Node: Front-Left را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Terminal Parameters را پیدا کنید . در قسمت متنی u p10 ، hb/2+wv1(t[1/s]) را تایپ کنید . |
گره جابجایی: جلو-راست
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای گره جابجایی ، Displacement Node: Front-Right را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Terminal Parameters را پیدا کنید . در قسمت متنی u p10 ، 0[mm] را تایپ کنید . |
گره جابجایی: عقب-چپ
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای گره جابجایی ، Displacement Node: Rear-Left را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Terminal Parameters را پیدا کنید . در قسمت متنی u p10 ، hb/2+wv2(t[1/s]) را تایپ کنید . |
گره جابجایی: عقب-راست
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای گره جابجایی ، Displacement Node: Rear-Right را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Terminal Parameters را پیدا کنید . در قسمت متنی u p10 ، 0[mm] را تایپ کنید . |
زیرسیستم نمونه X1: چرخ جلو-چپ
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Subsystem Instance ، Subsystem Instance X1: Front-Left Wheel را در قسمت نوشتاری Label تایپ کنید . |
3 | قسمت Node Connections را پیدا کنید . از لیست پیوند نام زیرسیستم ، Subsystem Definition: Wheel (sub1) را انتخاب کنید . |
4 | در جدول تنظیمات زیر را وارد کنید: |
نام گره های محلی | نام گره ها |
آ | 1 |
ب | 5 |
نمونه های زیر سیستم
گره بالا را کپی کنید و با استفاده از اطلاعات داده شده در جدول زیر چرخ های بیشتری ایجاد کنید:
برچسب | آ | ب |
زیرسیستم نمونه X2: چرخ جلو-راست | 2 | 6 |
زیرسیستم نمونه X3: چرخ عقب-چپ | 3 | 7 |
زیرسیستم نمونه X4: چرخ عقب-راست | 4 | 8 |
پس از تعریف چرخ ها، اکنون بدنه خودرو را با استفاده از یک گره منبع خارجی تعریف کنید. بدنه خودرو سه درجه آزادی دارد و بنابراین در رابط Multibody Dynamics تعریف شده است .
منبع خارجی E1: جلو-چپ
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای منبع خارجی ، External Source E1: Front-Left را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Node Connections را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
برچسب | نام گره ها |
p1 | 5 |
p2 | 9 |
4 | قسمت Component Parameters را پیدا کنید . از فهرست جابجایی ورودی ، از جفت چندفیزیکی را انتخاب کنید . |
5 | قسمت Results را پیدا کنید . زیربخش Add the following to default results را پیدا کنید . کادر تیک Force را پاک کنید . |
6 | چک باکس Displacement را پاک کنید . |
منابع خارجی
گره بالا را کپی کنید و با استفاده از اطلاعات ارائه شده در جدول زیر منابع خارجی بیشتری ایجاد کنید:
برچسب | P1 | P2 |
منبع خارجی E2: جلو-راست | 6 | 10 |
منبع خارجی E3: عقب-چپ | 7 | 11 |
منبع خارجی E4: عقب-راست | 8 | 12 |
سپس صندلی های نصب شده روی بدنه را مشخص کنید.
زیرسیستم نمونه X5: صندلی جلو-چپ
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Subsystem Instance ، Subsystem Instance X5: Front-Left Seat را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Node Connections را پیدا کنید . از لیست پیوند نام زیرسیستم ، Subsystem Definition: Seat (sub2) را انتخاب کنید . |
4 | در جدول تنظیمات زیر را وارد کنید: |
نام گره های محلی | نام گره ها |
آ | 9 |
نمونه های زیر سیستم
گره بالا را کپی کنید و با استفاده از اطلاعات داده شده در جدول زیر صندلی های بیشتری ایجاد کنید:
برچسب | آ |
زیرسیستم نمونه X6: صندلی جلو-راست | 10 |
زیرسیستم نمونه X7: صندلی عقب-چپ | 11 |
زیرسیستم نمونه X8: صندلی عقب-راست | 12 |
اکنون بدنه خودرو را با استفاده از یک گره مواد سفت و سخت تعریف کنید و نیروهای واکنش چرخ و صندلی را اعمال کنید.
MULTIBODY DYNAMICS (MBD)
در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Multibody Dynamics (mbd) کلیک کنید .
مواد سفت و سخت 1
1 | در نوار ابزار Physics ، روی |
2 | فقط دامنه 1 را انتخاب کنید. |
3 | در پنجره تنظیمات برای مواد سفت ، بخش تراکم را پیدا کنید . |
4 | از لیست ρ ، User defined را انتخاب کنید . قسمت مرکز چرخش را پیدا کنید . از لیست، User defined را انتخاب کنید . |
جرم و لحظه اینرسی 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات Mass and Moment of Inertia ، بخش Mass and Moment of Inertia را پیدا کنید . |
3 | در قسمت متن m ، m_body را تایپ کنید . |
4 | از لیست، مورب را انتخاب کنید . |
5 | در جدول I تنظیمات زیر را وارد کنید: |
من_غلت می کنم | 0 | 0 |
0 | من_پیچ | 0 |
0 | 0 | 0 |
مواد سفت و سخت 1
در پنجره Model Builder ، روی Rigid Material 1 کلیک کنید .
جابجایی / چرخش تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای جابجایی/چرخش تجویز شده ، قسمت جابجایی تجویز شده در مرکز چرخش را پیدا کنید . |
3 | تیک Prescribed in x direction را انتخاب کنید . |
4 | کادر بررسی تجویز شده در جهت y را انتخاب کنید . |
5 | بخش چرخش تجویز شده را پیدا کنید . از لیست By ، چرخش محدود را انتخاب کنید . |
6 | تیک گزینه Constrain rotation حول محور z را انتخاب کنید . |
چند فیزیک
اتصال ساختاری برآمده: جلو-چپ
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای اتصال ساختاری توده ای ، در قسمت نوشتار برچسب ، اتصال ساختار توده: جلو-چپ را تایپ کنید . |
3 | فقط نقطه 7 را انتخاب کنید. |
4 | قسمت Point Selection، Port-2 را پیدا کنید . برای انتخاب دکمه ضامن |
5 | فقط نقطه 8 را انتخاب کنید. |
اتصال ساختاری برآمده: جلو-راست
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای اتصال ساختار توده ، در قسمت نوشتار برچسب ، اتصال ساختار توده: جلو-راست را تایپ کنید . |
3 | فقط نقطه 5 را انتخاب کنید. |
4 | قسمت Point Selection، Port-2 را پیدا کنید . برای انتخاب دکمه ضامن |
5 | فقط نقطه 6 را انتخاب کنید. |
6 | قسمت تنظیمات اتصال را پیدا کنید . از لیست، External Source E2: Front-Right را انتخاب کنید . |
اتصال ساختاری برآمده: عقب-چپ
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای اتصال ساختاری توده ای ، در قسمت نوشتار برچسب ، اتصال ساختار توده ای: عقب-چپ را تایپ کنید . |
3 | فقط نقطه 3 را انتخاب کنید. |
4 | قسمت Point Selection، Port-2 را پیدا کنید . برای انتخاب دکمه ضامن |
5 | فقط نقطه 4 را انتخاب کنید. |
6 | قسمت تنظیمات اتصال را پیدا کنید . از لیست، External Source E3: Rear-Left را انتخاب کنید . |
اتصال ساختاری برآمده: عقب-راست
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای اتصال ساختاری توده ای ، در قسمت نوشتار برچسب ، اتصال ساختار توده: عقب-راست را تایپ کنید . |
3 | فقط نقطه 1 را انتخاب کنید. |
4 | قسمت Point Selection، Port-2 را پیدا کنید . برای انتخاب دکمه ضامن |
5 | فقط نقطه 2 را انتخاب کنید. |
6 | قسمت تنظیمات اتصال را پیدا کنید . از لیست، External Source E4: Rear-Right را انتخاب کنید . |
مطالعه 1
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در بخش مطالعه 1 ، روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
3 | در قسمت متنی زمان خروجی ، range(0,0.0002,2) را تایپ کنید . |
راه حل 1 (sol1)
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره Model Builder ، گره Solution 1 (sol1) را گسترش دهید . |
3 | در پنجره Model Builder ، گره Study 1>Solver Configurations>Solution 1 (sol1)>Time-Dependent Solver 1 را گسترش دهید . |
4 | روی Study 1>Solver Configurations>Solution 1 (sol1)>Time-Dependent Solver 1 کلیک راست کرده و Fully Coupled را انتخاب کنید . |
5 | در پنجره Settings for Fully Coupled ، برای گسترش بخش Method and Termination کلیک کنید . |
6 | از لیست بهروزرسانی Jacobian ، روی هر تکرار را انتخاب کنید . |
7 | در قسمت حداکثر تعداد تکرار ، 15 را تایپ کنید . |
8 | در نوار ابزار مطالعه ، |
دستورالعمل ها را برای ترسیم تحریک جاده همانطور که در شکل 3 نشان داده شده است دنبال کنید .
نتایج
هیجان جاده (چرخ های چپ)
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Road Excitation (چرخ چپ) را در قسمت نوشتار برچسب تایپ کنید . |
3 | برای گسترش بخش عنوان کلیک کنید . از لیست نوع عنوان ، Label را انتخاب کنید . |
4 | قسمت Data را پیدا کنید . از لیست انتخاب زمان ، Interpolated را انتخاب کنید . |
5 | در قسمت متن Times (s) range(0,0.0002,0.1) را تایپ کنید . |
جهانی 1
1 | روی Road Excitation ( چرخهای چپ) کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)> Lumped Mechanical System> Node displacements>lms.u_1 – Displacement in node 1 – m را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)> Lumped Mechanical System> Node displacements>lms.u_3 – Displacement in node 3 – m را انتخاب کنید . |
4 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
lms.u_1 | متر | جلو سمت چپ |
lms.u_3 | متر | عقب سمت چپ |
هیجان جاده (چرخ های چپ)
1 | در پنجره Model Builder ، روی Road Excitation ( Wheels چپ) کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | کادر بررسی برچسب محور y را انتخاب کنید . در فیلد متن مرتبط، جابجایی (m) را تایپ کنید . |
4 | در نوار ابزار Road Excitation (چرخ های چپ) ، روی |
5 |
دستورالعمل های زیر را دنبال کنید تا حرکت و سرعت خودرو را همانطور که به ترتیب در شکل 4 و شکل 5 نشان داده شده است، ترسیم کنید .
حرکت خودرو (CG)
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، حرکت خودرو (CG) را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت عنوان را پیدا کنید . از لیست نوع عنوان ، Label را انتخاب کنید . |
4 | قسمت Plot Settings را پیدا کنید . چک باکس Two y-axes را انتخاب کنید . |
جهانی 1
1 | روی Vehicle Motion (CG) کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Rigid domains>Rigid Material 1>Rigid body rotation (Spatial frame) – rad>mbd.rd1.thx – Rigid body rotation، x component را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Rigid domains>Rigid Material 1>Rigid body rotation (Spatial frame) – rad>mbd.rd1.thy – Rigid body rotation، y component را انتخاب کنید . |
4 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rd1.thx | درجه | رول |
mbd.rd1.thy | درجه | گام صدا |
جهانی 2
1 | در پنجره Model Builder ، روی Vehicle Motion (CG) کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Rigid domains>Rigid Material 1>Rigid body displacement (Spatial frame) – m>mbd.rd1.w – Rigid body displacement، z component را انتخاب کنید . |
3 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rd1.w | متر | بلند کن |
4 | بخش y-Axis را پیدا کنید . کادر Plot on secondary y-axis را انتخاب کنید . |
حرکت خودرو (CG)
1 | در پنجره Model Builder ، روی Vehicle Motion (CG) کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | کادر بررسی برچسب محور y را انتخاب کنید . در قسمت متن مرتبط، چرخش (deg) را تایپ کنید . |
4 | چک باکس Secondary y-axis label را انتخاب کنید . در فیلد متن مرتبط، جابجایی (m) را تایپ کنید . |
5 | در نوار ابزار Vehicle Motion (CG) ، روی |
6 |
سرعت خودرو (CG)
1 | روی Vehicle Motion (CG) کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، سرعت خودرو (CG) را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Plot Settings را پیدا کنید . در فیلد نوشتاری برچسب محور y ، Angular velocity (rad/s) را تایپ کنید . |
4 | در فیلد نوشتاری برچسب محور y ثانویه ، Velocity (m/s) را تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Vehicle Velocity (CG) را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rd1.th_tx | راد/ثانیه | رول |
mbd.rd1.th_ty | راد/ثانیه | گام صدا |
جهانی 2
1 | در پنجره Model Builder ، روی Global 2 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rd1.wt | اماس | بلند کن |
سرعت خودرو (CG)
1 | در پنجره Model Builder ، روی Vehicle Velocity (CG) کلیک کنید . |
2 | در نوار ابزار Vehicle Velocity (CG) ، روی |
3 |
برای ترسیم تغییر مکان و شتاب صندلی همانطور که در شکل 6 و شکل 7 نشان داده شده است، دستورالعمل های زیر را دنبال کنید .
جابجایی صندلی
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، جابجایی صندلی را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت عنوان را پیدا کنید . از لیست نوع عنوان ، Label را انتخاب کنید . |
جهانی 1
1 | روی Seat Displacement کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Lumped Mechanical System>Subsystem X5>Two port components>M1>lms.X5_M1_u – Displacement (M1) – m را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Lumped Mechanical System>Subsystem X6>Two port components>M1>lms.X6_M1_u – Displacement (M1) – m را انتخاب کنید . |
4 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Lumped Mechanical System>Subsystem X7>Two port components>M1>lms.X7_M1_u – Displacement (M1) – m را انتخاب کنید . |
5 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Lumped Mechanical System>Subsystem X8>Two port components>M1>lms.X8_M1_u – Displacement (M1) – m را انتخاب کنید . |
6 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
lms.X5_M1_u | متر | جلو سمت چپ |
lms.X6_M1_u | متر | جلو-راست |
lms.X7_M1_u | متر | عقب سمت چپ |
lms.X8_M1_u | متر | عقب-راست |
جابجایی صندلی
1 | در پنجره Model Builder ، روی Seat Displacement کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | کادر بررسی برچسب محور y را انتخاب کنید . در فیلد متن مرتبط، جابجایی (m) را تایپ کنید . |
4 | در نوار ابزار جابجایی صندلی ، روی |
5 |
شتاب صندلی
1 | روی Seat Displacement کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، شتاب صندلی را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Plot Settings را پیدا کنید . در قسمت نوشتاری برچسب محور y ، Acceleration (m/s^2) را تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Seat Acceleration را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
d(lms.X5_M1_dudt,t) | 1/s | جلو سمت چپ |
d(lms.X6_M1_dudt,t) | 1/s | جلو-راست |
d(lms.X7_M1_dudt,t) | 1/s | عقب سمت چپ |
d(lms.X8_M1_dudt,t) | 1/s | عقب-راست |
شتاب صندلی
1 | در پنجره Model Builder ، روی Seat Acceleration کلیک کنید . |
2 | در نوار ابزار شتاب صندلی ، روی |
3 |
دستورالعمل های زیر را دنبال کنید تا نیروها را در چرخ جلو چپ و صندلی همانطور که در شکل 8 و شکل 9 نشان داده شده است ترسیم کنید .
نیروها (چرخ جلو-چپ)
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Forces (چرخ جلو-چپ) را در قسمت متن برچسب تایپ کنید . |
3 | قسمت عنوان را پیدا کنید . از لیست نوع عنوان ، Label را انتخاب کنید . |
جهانی 1
1 | روی Forces ( چرخ جلو-چپ) کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Lumped Mechanical System>Subsystem X1>Two port components>K1>lms.X1_K1_f – Spring force (K1) – N را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Lumped Mechanical System>Subsystem X1>Two port components>K2>lms.X1_K2_f – Spring force (K2) – N را انتخاب کنید . |
4 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Lumped Mechanical System>Subsystem X1>Two port components>C1>lms.X1_C1_f – Damping force (C1) – N را انتخاب کنید . |
نیروها (چرخ جلو-چپ)
1 | در پنجره Model Builder ، روی Forces ( چرخ جلو-چپ) کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | کادر بررسی برچسب محور y را انتخاب کنید . در قسمت متن مرتبط، Force (N) را تایپ کنید . |
4 | در نوار ابزار Forces (چرخ جلو-چپ) ، روی |
5 |
نیروها (صندلی جلو-چپ)
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Forces (صندلی جلو-چپ) را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت عنوان را پیدا کنید . از لیست نوع عنوان ، Label را انتخاب کنید . |
جهانی 1
1 | روی Forces ( صندلی جلو-چپ) کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Lumped Mechanical System>Subsystem X5>Two port components>K1>lms.X5_K1_f – Spring force (K1) – N را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Lumped Mechanical System>Subsystem X5>Two port components>C1>lms.X5_C1_f – Damping force (C1) – N را انتخاب کنید . |
نیروها (صندلی جلو-چپ)
1 | در پنجره Model Builder ، روی Forces ( صندلی جلو-چپ) کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | کادر بررسی برچسب محور y را انتخاب کنید . در قسمت متن مرتبط، Force (N) را تایپ کنید . |
4 | در نوار ابزار Forces (صندلی جلو-چپ) ، روی |
5 |



