
مدلسازی مکانیزم باز کردن دریچه مبتنی بر بادامک شعاعی
معرفی
در این مثال، مکانیزم باز شدن شیر فنری با بازوی راکر و بادامک شعاعی مورد مطالعه قرار گرفته است. تمام اجزای سیستم به صورت صلب مدلسازی شدهاند و از طریق اتصالات منشوری، لولا و شکاف به هم متصل میشوند. اتصال cam-follower و همچنین سایر اتصالات مشترک با استفاده از گرههای داخلی رابط Multibody Dynamics مدلسازی میشوند.
تجزیه و تحلیل گذرا برای مقادیر مختلف سفتی فنر سوپاپ انجام می شود. خروجی از مدل شامل بسیاری از موارد، سرعت پیرو، شتاب پیرو، نیروی اتصال بادامک-پیروی، و گشتاور مورد نیاز برای چرخش شفت بادامک است.
تعریف مدل
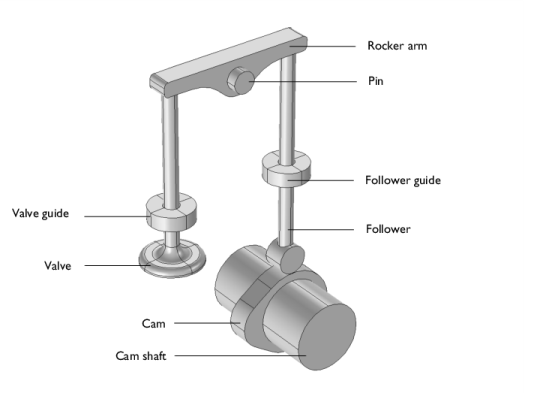
شکل 1: هندسه مکانیزم باز شدن شیر با بازوی راکر و بادامک شعاعی.
هندسه مکانیزم باز شدن شیر در شکل 1 نشان داده شده است . تمامی اجزای مکانیزم صلب فرض شده و بر اساس متحرک یا ثابت بودن به دو دسته تقسیم می شوند.
اجزای متحرک مکانیزم عبارتند از:
• | بادامک و شفت بادامک |
• | دنباله رو |
• | اهرم خود کار برای حرکت سوپاپ ماشین |
• | شیر فلکه |
اجزای ثابت مکانیسم ها عبارتند از:
• | راهنمای فالوور |
• | سنجاق |
• | راهنمای سوپاپ |
در این مکانیسم، چرخش بادامک تجویز می شود و فنر برای محدود کردن حرکت آن به شیر متصل می شود. هدف از این تحلیل دو مورد است:
• | برای محاسبه جابجایی، سرعت و شتاب دنبال کننده برای یک RPM شفت بادامک معین. |
• | برای محاسبه نیروی اتصال بادامک-پیروی، و گشتاور مورد نیاز برای چرخش شفت بادامک در یک RPM معین برای مقادیر مختلف سفتی فنر سوپاپ. |
یکی از اهداف اصلی در پشت نصب فنر روی شیر این است که دنبال کننده را وادار به دنبال کردن پروفیل بادامک و جلوگیری از تماس های متناوب بین بادامک و دنبال کننده است. از این رو، مقدار بهینه سفتی فنر سوپاپ باید مقداری باشد که تماس بین بادامک و پیرو را در تمام مدت برقرار کند و در عین حال به کمترین گشتاور برای چرخش شفت بادامک نیاز داشته باشد.
پروفایل دوربین
مشخصات بادامک مورد استفاده در این مکانیسم همراه با حداکثر بالابر پیرو در شکل 2 نشان داده شده است . مشاهده می شود که پروفیل بادامک بر اساس حرکت فالوور یا سوپاپ به چهار ناحیه تقسیم می شود:
• | Heal – دریچه در این منطقه بسته باقی می ماند. |
• | سمت باز – شیر در این منطقه شروع به باز شدن می کند. |
• | بینی – دریچه در این منطقه تقریباً کاملاً باز است. |
• | سمت بسته – شیر در این ناحیه شروع به بسته شدن می کند. |
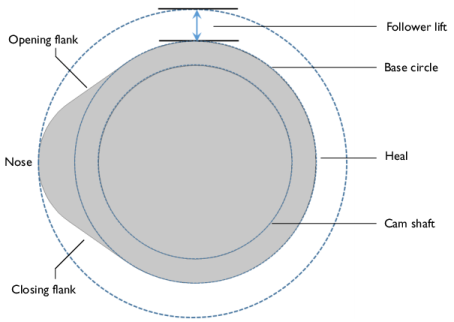
شکل 2: پروفیل یک بادامک که برای باز و بسته شدن یک شیر استفاده می شود.
مش بندی سطح A CAM
یک نقطه روی بدنه دنبالهدار، نمایه بادامک را دنبال میکند که از طریق یک شبکه المان محدود گسسته میشود. از این رو برای به دست آوردن نتایج دقیق و جلوگیری از نوسانات کاذب، لازم است مشی وجود داشته باشد که نمایه بادامک را با دقت بازتولید کند، همانطور که در شکل 3 نشان داده شده است .
مفاصل
جدا از اتصال بادامک، از انواع اتصالات زیر برای اتصال اجزای مختلف سیستم استفاده می شود:
• | دو مفصل لولا |
• | دو مفصل منشوری |
• | دو مفصل شکافی |
مواد
فولاد سازه ای به عنوان ماده برای تمام اجزا استفاده می شود.

شکل 3: یک شبکه نگاشت شده ریز که روی سطح بادامک ایجاد شده است تا نمایش دقیقی از سطح ایجاد شود.
پارامترهای مدل
پارامترهای مورد استفاده در مدل در جدول زیر آورده شده است:
شرح | نام | اصطلاح |
شعاع فالوور | RF | (0.025/3) متر |
سفتی فنری | ک | 5 کیلو نیوتن بر متر |
دور شفت بادامک | ن | 1200 |
این مدل با 4 مقدار مختلف سختی فنر سوپاپ حل شده است: 5 kN/m، 10 kN/m، 20 kN/m و 30 kN/m.
نتایج و بحث
شکل 4 سرعت پیرو را همراه با جابجایی پیرو به عنوان تابعی از چرخش بادامک نشان می دهد. مشاهده میشود که سرعت پیرو فقط برای محدوده کوچکی از چرخشهای بادامک ( 35 ° -145 درجه ) غیر صفر است.
سرعت فالوور ابتدا با تماس فالوور با ناحیه کناره باز شدن پروفیل بادامک افزایش می یابد، بعداً کاهش می یابد و در نوک ناحیه دماغه صفر می شود. به طور مشابه در جهت معکوس افزایش می یابد و زمانی که فالوئر در تماس با ناحیه التیام پروفیل بادامک قرار می گیرد صفر می شود.
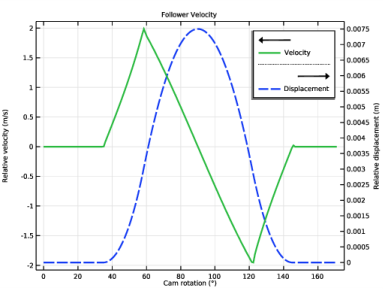
شکل 4: تغییر سرعت پیرو با چرخش بادامک.
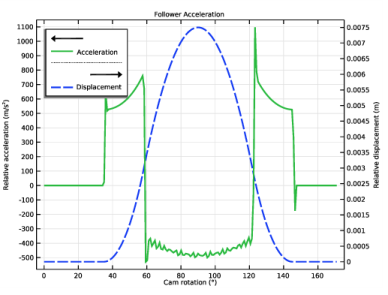
شکل 5: تغییر شتاب پیرو با چرخش بادامک.
شتاب پیرو مربوطه در شکل 5 نشان داده شده است . مشاهده می شود که مقادیر شتاب در محدوده 60 درجه تا 120 درجه چرخش بادامک منفی است. این ناحیه ای است که دنبال کننده تمایل به ترک تماس با نمایه بادامک دارد که به مقدار سفتی فنر سوپاپ برای یک RPM میل بادامک داده شده بستگی دارد.
شکل 6 و شکل 7 به ترتیب نیروی اتصال بادامک و گشتاور مورد نیاز برای چرخش شفت بادامک را نشان می دهند. برای برقراری تماس مداوم بین بادامک و فالوور، نیروی اتصال باید همیشه منفی باشد.
مشاهده می شود که از چهار مقدار سفتی سوپاپ، تنها 20 کیلو نیوتن بر متر و 30 کیلو نیوتن بر متر می تواند یک تماس مداوم بین بادامک و دنبال کننده ایجاد کند. به منظور انتخاب مقدار بهینه برای سختی فنر سوپاپ، میتوان به نمودار گشتاور مورد نیاز در شکل 7 نگاه کرد . در این نمودار می توان متوجه شد که گشتاور مورد نیاز برای مقدار 20 کیلو نیوتن بر متر کمتر است و از این رو مقدار بهینه سفتی شیر در بین مقادیر در نظر گرفته شده در این تحلیل است.

شکل 6: تغییر نیروی اتصال بادامک با چرخش بادامک برای مقادیر مختلف سفتی فنر سوپاپ.

شکل 7: تغییر گشتاور مورد نیاز برای چرخش محور بادامک برای مقادیر مختلف سفتی فنر سوپاپ.
نکاتی درباره پیاده سازی COMSOL
• | ترتیب گسسته سازی متغیر وابسته را به Quadratic تغییر دهید تا ترتیب شکل هندسی را افزایش دهید و دقت مش نرمال مورد استفاده در گره اتصال Cam-Follower را بهبود بخشید. |
• | در صورت امکان از یک مش نگاشت ظریف روی سطح بادامک استفاده کنید تا دقت مش نرمال مورد استفاده در گره اتصال Cam-Follower بهبود یابد . |
• | در صورت ارزیابی نیروهای واکنش با استفاده از محدودیتهای ضعیف در اتصالات و گرههای اتصال بادامک، سعی کنید مقیاس پیشفرض متغیرهای نیروی واکنش و گشتاور را افزایش دهید تا همگرایی راهحل را بهبود بخشد. |
مسیر کتابخانه برنامه: Multibody_Dynamics_Module/Tutorials/radial_cam_follower
دستورالعمل مدلسازی
از منوی File ، New را انتخاب کنید .
جدید
در پنجره جدید ، روی  Model Wizard کلیک کنید .
Model Wizard کلیک کنید .
مدل جادوگر
1 | در پنجره Model Wizard ، روی |
2 | در درخت Select Physics ، Structural Mechanics>Multibody Dynamics (mbd) را انتخاب کنید . |
3 | روی افزودن کلیک کنید . |
4 |
5 | در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
6 |
تعاریف جهانی
پارامترهای 1
1 | در پنجره Model Builder ، در قسمت Global Definitions روی Parameters 1 کلیک کنید . |
2 | در پنجره تنظیمات برای پارامترها ، بخش پارامترها را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل radial_cam_follower_parameters.txt دوبار کلیک کنید . |
هندسه 1
واردات 1 (imp1)
1 | در پنجره Model Builder ، گره Component 1 (comp1)>Geometry 1 را گسترش دهید . |
2 | روی Geometry 1 کلیک راست کرده و Import را انتخاب کنید . |
3 | در پنجره تنظیمات برای واردات ، بخش واردات را پیدا کنید . |
4 |
5 | به پوشه Application Libraries مدل بروید و روی فایل radial_cam_follower.mphbin دوبار کلیک کنید . |
6 |
فرم اتحادیه (فین)
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Form Union (fin) کلیک کنید . |
2 | در پنجره تنظیمات Form Union/Assembly ، بخش Form Union/Assembly را پیدا کنید . |
3 | از لیست Action ، Form an assembly را انتخاب کنید . |
4 | تیک Create Pairs را پاک کنید . |
5 | در نوار ابزار Home ، روی |
تعاریف جهانی
مرحله 1 (مرحله 1)
1 | در نوار ابزار Home ، روی |
2 | در پنجره تنظیمات برای مرحله ، قسمت پارامترها را پیدا کنید . |
3 | در قسمت متن مکان ، T/40 را تایپ کنید . |
4 | برای گسترش بخش Smoothing کلیک کنید . در قسمت متن Size of transition zone ، T/20 را تایپ کنید . |
تعاریف
سطح بادامک
1 | در نوار ابزار تعاریف ، روی |
2 | در پنجره تنظیمات برای Explicit ، بخش Input Entities را پیدا کنید . |
3 | از لیست سطح نهاد هندسی ، Boundary را انتخاب کنید . |
4 | فقط مرز 89 را انتخاب کنید. |
5 | تیک گروه بر اساس مماس پیوسته را انتخاب کنید . |
6 | در قسمت نوشتار Label ، Cam Surface را تایپ کنید . |
سطح بادامک: لبه های مجاور
1 | در نوار ابزار تعاریف ، |
2 | در پنجره تنظیمات برای مجاور ، بخش Input Entities را پیدا کنید . |
3 | از لیست سطح نهاد هندسی ، Boundary را انتخاب کنید . |
4 | در قسمت انتخابهای ورودی ، روی افزودن کلیک کنید . |
5 | در کادر محاورهای افزودن ، Cam Surface را در لیست انتخابهای ورودی انتخاب کنید . |
6 | روی OK کلیک کنید . |
7 | در پنجره تنظیمات برای مجاور ، بخش Output Entities را پیدا کنید . |
8 | از لیست سطح موجودیت هندسی ، لبه های مجاور را انتخاب کنید . |
9 | در قسمت نوشتار برچسب ، Cam Surface: Adjacent Edges را تایپ کنید . |
مواد را اضافه کنید
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Material بروید . |
3 | در درخت، Built-in>Structural steel را انتخاب کنید . |
4 | روی Add to Component در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
MULTIBODY DYNAMICS (MBD)
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Multibody Dynamics (mbd) کلیک کنید . |
2 | در پنجره تنظیمات برای Multibody Dynamics ، برای گسترش بخش Discretization کلیک کنید . |
3 | از لیست فیلد Displacement ، Quadratic Lagrange را انتخاب کنید . |
با تعریف اجزای مختلف مکانیزم به عنوان بدنه های صلب شروع کنید.
مواد سفت و سخت: بادامک
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای مواد سفت و سخت ، عبارت Rigid Material: Cam را در قسمت نوشتار Label تایپ کنید . |
3 | فقط دامنه 5 را انتخاب کنید. |
مواد سفت و سخت
با اطلاعات ارائه شده در جدول زیر، اجزای بیشتری ایجاد کنید:
برچسب | انتخاب |
مواد سفت و سخت: پیرو | 7 |
مواد سفت و سخت: بازوی راکر | 3 |
مواد سفت و سخت: شیر | 1 |
مواد سفت و سخت: راهنمای پیرو | 6 |
مواد سفت و سخت: پین | 4 |
مواد سفت و سخت: راهنمای شیر | 2 |
مواد سفت و سخت: راهنمای پیرو
در پنجره Model Builder ، روی Rigid Material: Follower Guide کلیک کنید .
محدودیت ثابت 1
در نوار ابزار Physics ، روی Attributes کلیک کنید و Fixed Constraint را انتخاب کنید .
مواد سفت و سخت: پین
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Rigid Material: Pin کلیک کنید .
محدودیت ثابت 1
در نوار ابزار Physics ، روی Attributes کلیک کنید و Fixed Constraint را انتخاب کنید .
مواد سفت و سخت: راهنمای شیر
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Gid Material: Valve Guide کلیک کنید .
محدودیت ثابت 1
در نوار ابزار Physics ، روی Attributes کلیک کنید و Fixed Constraint را انتخاب کنید .
اکنون اتصال بادامک و اتصالات را برای اتصال اجزای مختلف مکانیزم تعریف کنید.
Cam-Follower 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Cam-Follower ، بخش انتخاب مرز ، دوربین را پیدا کنید . |
3 | از لیست انتخاب ، Cam Surface را انتخاب کنید . |
4 | قسمت Point Selection, Follower را پیدا کنید . |
5 | در کادر محاوره ای Paste Selection ، 148 164 را در قسمت متن Selection تایپ کنید . |
6 | روی OK کلیک کنید . |
7 | در پنجره تنظیمات برای Cam-Follower ، بخش Cam را پیدا کنید . |
8 | در قسمت متن X offset ، rf را تایپ کنید . |
9 | بخش Connection Force را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
مفصل لولا 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت انتخاب پیوست را پیدا کنید . |
3 | از لیست منبع ، ثابت را انتخاب کنید . |
4 | از فهرست مقصد ، Rigid Material: Cam را انتخاب کنید . |
5 | قسمت Center of Joint را پیدا کنید . از لیست سطح نهاد ، نقطه را انتخاب کنید . |
6 | قسمت Axis of Joint را پیدا کنید . بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
1 | y |
0 | z |
مرکز مفصل: نقطه 1
1 | در پنجره Model Builder ، روی Center of Joint: Point 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : نقطه ، قسمت انتخاب نقطه را پیدا کنید . |
3 |
4 | در کادر محاوره ای Paste Selection ، 108 128 را در قسمت متن انتخاب تایپ کنید . |
5 | روی OK کلیک کنید . |
مفاصل
اتصالات باقیمانده را با استفاده از اطلاعات ارائه شده در جدول زیر ایجاد کنید:
برچسب | منبع | مقصد | مرکز مفصل (نقاط) | محور مشترک |
مفصل لولا 2 | مواد سفت و سخت: پین | مواد سفت و سخت: بازوی راکر | 94، 100 | {0،1،0} |
مفصل منشوری 1 | مواد سفت و سخت: راهنمای پیرو | مواد سفت و سخت: پیرو | 133، 147 | {0,0,1} |
مفصل منشوری 2 | مواد سفت و سخت: راهنمای شیر | مواد سفت و سخت: شیر | 35، 49 | {0,0,1} |
مفصل شکاف 1 | مواد سفت و سخت: بازوی راکر | مواد سفت و سخت: پیرو | 151، 162 | پیش فرض |
مفصل اسلات 2 | مواد سفت و سخت: بازوی راکر | مواد سفت و سخت: شیر | 58، 62 | پیش فرض |
بعد، چرخش بادامک را تجویز کنید و یک فنر به حرکت سوپاپ اضافه کنید.
مفصل لولا 1
در پنجره Model Builder ، روی Hinge Joint 1 کلیک کنید .
حرکت تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای حرکت تجویز شده ، قسمت حرکت چرخشی تجویز شده را پیدا کنید . |
3 | از لیست حرکت تجویز شده ، سرعت زاویه ای را انتخاب کنید . |
4 | در قسمت متن ω p ، omega*step1(t) را تایپ کنید . |
5 | برای باز کردن بخش Reaction Force Settings کلیک کنید . کادر بررسی نیروهای واکنش را انتخاب کنید . |
مفصل منشوری 2
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Prismatic Joint 2 کلیک کنید .
فنر و دمپر 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Spring and Damper ، بخش Spring and Damper: Translational را پیدا کنید . |
3 | در قسمت متن k u ، k را تایپ کنید . |
مش 1
لبه 1
1 | در نوار ابزار Mesh ، روی |
2 | در پنجره تنظیمات برای Edge ، قسمت Edge Selection را پیدا کنید . |
3 | از لیست انتخاب ، Cam Surface: Adjacent Edges را انتخاب کنید . |
سایز 1
1 | روی Edge 1 کلیک راست کرده و Size را انتخاب کنید . |
2 | در پنجره تنظیمات برای اندازه ، قسمت اندازه عنصر را پیدا کنید . |
3 | روی دکمه Custom کلیک کنید . |
4 | قسمت پارامترهای اندازه عنصر را پیدا کنید . |
5 | تیک گزینه Curvature factor را انتخاب کنید . در قسمت متن مرتبط، 0.015 را تایپ کنید . |
6 | کادر بررسی حداکثر نرخ رشد عنصر را انتخاب کنید . در قسمت متن مرتبط، 1.1 را تایپ کنید . |
7 |
نقشه برداری 1
1 | در نوار ابزار Mesh ، روی |
2 | در پنجره تنظیمات برای Mapped ، بخش انتخاب مرز را پیدا کنید . |
3 | از لیست انتخاب ، Cam Surface را انتخاب کنید . |
توزیع 1
1 | روی Mapped 1 کلیک راست کرده و Distribution را انتخاب کنید . |
2 | در پنجره تنظیمات برای توزیع ، قسمت Edge Selection را پیدا کنید . |
3 |
4 | در کادر محاورهای Paste Selection ، 199 را در قسمت متن انتخاب تایپ کنید . |
5 | روی OK کلیک کنید . |
6 | در پنجره تنظیمات برای توزیع ، بخش توزیع را پیدا کنید . |
7 | در فیلد متنی Number of element ، 3 را تایپ کنید . |
چهار وجهی رایگان 1
در نوار ابزار Mesh ، روی Free Tetrahedral کلیک کنید .
اندازه
1 | در پنجره Model Builder ، روی Size کلیک کنید . |
2 | در پنجره تنظیمات برای اندازه ، قسمت اندازه عنصر را پیدا کنید . |
3 | از لیست از پیش تعریف شده ، Extra fine را انتخاب کنید . |
4 |
مطالعه 1
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در بخش مطالعه 1 ، روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
3 | در قسمت متن زمان خروجی ، محدوده (0,T/400,T/2) را تایپ کنید . |
4 | برای گسترش بخش Study Extensions کلیک کنید . کادر بررسی جارو کمکی را انتخاب کنید . |
5 |
6 | در جدول تنظیمات زیر را وارد کنید: |
نام پارامتر | لیست مقادیر پارامتر | واحد پارامتر |
k (سفتی فنر) | 5 10 20 30 | kN/m |
راه حل 1 (sol1)
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره Model Builder ، گره Solution 1 (sol1) را گسترش دهید . |
3 | در پنجره Model Builder ، گره Study 1>Solver Configurations>Solution 1 (sol1)> Dependent Variables 1 را گسترش دهید ، سپس روی Connection force (comp1.mbd.cfc1.F) کلیک کنید . |
4 | در پنجره تنظیمات برای حالت ، بخش مقیاس گذاری را پیدا کنید . |
5 | در قسمت متن مقیاس ، 1e9 را تایپ کنید . |
6 | در پنجره Model Builder ، در قسمت Study 1>Solver Configurations>Solution 1 (sol1)> Dependent Variables 1 روی Reaction moment (comp1.mbd.hgj1.pm1.RM) کلیک کنید . |
7 | در پنجره تنظیمات برای حالت ، بخش مقیاس گذاری را پیدا کنید . |
8 | در قسمت متن مقیاس ، 1e7 را تایپ کنید . |
9 | در نوار ابزار مطالعه ، |
دستورالعمل های زیر را برای رسم سرعت و شتاب پیرو همانطور که در شکل 4 و شکل 5 نشان داده شده است دنبال کنید .
نتایج
سرعت فالوور
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، سرعت فالوور را در قسمت نوشتار برچسب تایپ کنید . |
3 | برای گسترش بخش عنوان کلیک کنید . از لیست نوع عنوان ، Label را انتخاب کنید . |
4 | قسمت Data را پیدا کنید . از لیست انتخاب پارامتر (k) ، First را انتخاب کنید . |
5 | قسمت Plot Settings را پیدا کنید . چک باکس Two y-axes را انتخاب کنید . |
جهانی 1
1 | روی Follower Velocity کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Prismatic Joint>Prismatic Joint 1>mbd.prj1.u – Relative displacement – m را انتخاب کنید . |
3 | بخش y-Axis را پیدا کنید . کادر Plot on secondary y-axis را انتخاب کنید . |
4 | قسمت x-Axis Data را پیدا کنید . از لیست Parameter ، Expression را انتخاب کنید . |
5 | روی Replace Expression در گوشه سمت راست بالای بخش x-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint 1>mbd.hgj1.th – Relative rotation – rad را انتخاب کنید . |
6 | قسمت x-Axis Data را پیدا کنید . از لیست واحد ، ° را انتخاب کنید . |
7 | چک باکس Description را انتخاب کنید . در فیلد نوشتاری مرتبط، Cam rotation را تایپ کنید . |
8 | برای گسترش بخش Coloring and Style کلیک کنید . زیربخش Line style را پیدا کنید . از لیست Line ، Dashed را انتخاب کنید . |
9 | از لیست Width ، 2 را انتخاب کنید . |
10 | برای گسترش بخش Legends کلیک کنید . از فهرست Legends ، Manual را انتخاب کنید . |
11 | در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
جابه جایی |
جهانی 2
1 | روی Global 1 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Prismatic Joint>Prismatic Joint 1>mbd.prj1.u_t – سرعت نسبی – m/s را انتخاب کنید . |
3 | بخش y-Axis را پیدا کنید . کادر Plot on secondary y-axis را پاک کنید . |
4 | قسمت Coloring and Style را پیدا کنید . زیربخش Line style را پیدا کنید . از لیست Line ، Solid را انتخاب کنید . |
5 | قسمت Legends را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
سرعت |
6 | در نوار ابزار Follower Velocity ، روی |
7 |
شتاب فالوور
1 | در پنجره Model Builder ، روی Follower Velocity کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، شتاب فالوور را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Legend را پیدا کنید . از لیست موقعیت ، سمت چپ بالا را انتخاب کنید . |
جهانی 2
1 | در پنجره Model Builder ، گره Follower Acceleration را گسترش دهید ، سپس روی Global 2 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>MetingsPrismatic >Prismatic Joint 1>mbd.prj1.u_tt – شتاب نسبی – m/s² را انتخاب کنید . |
3 | قسمت Legends را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
شتاب |
4 | در نوار ابزار Follower Acceleration ، روی |
5 |
برای رسم نیروی اتصال و گشتاور مورد نیاز همانطور که در شکل 6 و شکل 7 نشان داده شده است، دستورالعمل های زیر را دنبال کنید .
نیروی اتصال
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Connection Force را در قسمت متن برچسب تایپ کنید . |
3 | قسمت عنوان را پیدا کنید . از لیست نوع عنوان ، Label را انتخاب کنید . |
4 | قسمت Data را پیدا کنید . از لیست انتخاب زمان ، دستی را انتخاب کنید . |
5 | در قسمت متنی شاخصهای پارامتر (1-201) ، محدوده (25،1،201) را تایپ کنید . |
6 | قسمت Legend را پیدا کنید . از لیست موقعیت ، سمت چپ بالا را انتخاب کنید . |
جهانی 1
1 | روی Connection Force کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Cam-followers>Cam-Follower 1>mbd.cfc1.F – نیروی اتصال – N را انتخاب کنید . |
3 | قسمت x-Axis Data را پیدا کنید . از لیست Parameter ، Expression را انتخاب کنید . |
4 | روی Replace Expression در گوشه سمت راست بالای بخش x-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint 1>mbd.hgj1.th – Relative rotation – rad را انتخاب کنید . |
5 | قسمت x-Axis Data را پیدا کنید . از لیست واحد ، ° را انتخاب کنید . |
6 | چک باکس Description را انتخاب کنید . در فیلد نوشتاری مرتبط، Cam rotation را تایپ کنید . |
7 | قسمت Coloring and Style را پیدا کنید . از لیست Width ، 2 را انتخاب کنید . |
8 | قسمت Legends را پیدا کنید . زیربخش Include را پیدا کنید . کادر بررسی توضیحات را پاک کنید . |
9 | در نوار ابزار Connection Force ، روی |
10 |
گشتاور مورد نیاز
1 | در پنجره Model Builder ، روی Connection Force کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره Settings for 1D Plot Group ، Required Torque را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Legend را پیدا کنید . از لیست موقعیت ، سمت راست بالا را انتخاب کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Required Torque را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joints>Hinge Joint 1>mbd.hgj1.pm1.RM – Reaction moment – N·m را انتخاب کنید . |
3 | در نوار ابزار Required Torque ، روی |
4 |
انیمیشن 1
1 | در نوار ابزار نتایج ، روی |
2 | در پنجره تنظیمات برای انیمیشن ، بخش Frames را پیدا کنید . |
3 | در قسمت متنی Number of frames عدد 50 را تایپ کنید . |



