
از یک سیستم کروی (  ) برای تعریف یک سیستم مختصات کروی به صورت سه بعدی با مبدا، محور اوج و محور آزیموت استفاده کنید.
) برای تعریف یک سیستم مختصات کروی به صورت سه بعدی با مبدا، محور اوج و محور آزیموت استفاده کنید.
مختصات یک سیستم مختصات کروی محلی عبارتند از ( r ، θ،  )، که r نشاندهنده فاصله شعاعی از مبدأ، θ شیب (در فاصله 0 تا π ) و
)، که r نشاندهنده فاصله شعاعی از مبدأ، θ شیب (در فاصله 0 تا π ) و  زاویه زاویهای است (در فاصله از −π تا π ). مشخص کنید – از نظر مختصات دکارتی جهانی x ، y ، و z – موقعیت مبدا، محور θ = 0 (محور اوج، Z )، و محور θ = π/2،
زاویه زاویهای است (در فاصله از −π تا π ). مشخص کنید – از نظر مختصات دکارتی جهانی x ، y ، و z – موقعیت مبدا، محور θ = 0 (محور اوج، Z )، و محور θ = π/2،  = 0 (محور آزیموت) ، A). بردارهای جهت به طور خودکار نرمال می شوند.
= 0 (محور آزیموت) ، A). بردارهای جهت به طور خودکار نرمال می شوند.
این یک سیستم مختصات نرمال شده نگاشت شده با استفاده از تبدیل زیر در مختصات جهانی است
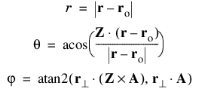
جایی که r o موقعیت مبدا است، Z یک بردار واحد در امتداد محور θ = 0 است و جزء r – r o در صفحه θ = π/ 2 است.
اگر این سیستم مختصات به عنوان یک گره فرعی به یک گره سیستم ترکیبی اضافه شود، با استفاده از یک انتخاب در بخش انتخاب موجودیت هندسی ، محل فعال بودن آن را مشخص کنید . همچنین فیلدهای Name و Coordinate names و لیست Frame در این مورد موجود نیستند.
تنظیمات
لیست فریم مانند سیستم استوانه ای است .
در جدول نامهای مختصات ، نامهای مختصات پیشفرض وارد میشوند – r ، theta ، و phi .
محل Origin را در سیستم مختصات دکارتی جهانی وارد کنید. پیشفرض منشأ منطبق با سیستم جهانی است.
جهت محور θ = 0 ( محور اوج ) را وارد کنید. جهت محور پیش فرض جهت z در سیستم جهانی دکارتی است.
جهت محور θ = π /2،  = 0 ( محور آزیموت ) را تعریف کنید. جهت پیش فرض جهت x در سیستم جهانی دکارتی است.
= 0 ( محور آزیموت ) را تعریف کنید. جهت پیش فرض جهت x در سیستم جهانی دکارتی است.
نسبت به سیستم از هندسه
در صورتی که صفحه کاری به هندسه اضافه کرده باشید، این بخش به صورت سه بعدی در دسترس است.
از لیست صفحه کار ، xy-plane (پیشفرض، برای یک سیستم مختصات دکارتی استاندارد جهانی) را انتخاب کنید یا هر صفحه کاری را در دنباله هندسه انتخاب کنید. اگر صفحه کاری را انتخاب کنید، مختصات xw , yw و zw صفحه کار برای تعریف مبدا و محور استفاده می شود.
|
|
برای اطلاعات در مورد پنجره تنظیمات Label and Name به Name بروید . همچنین تنظیمات و ویژگیهای ویندوز برای گرههای ویژه را ببینید.
|



