
از یک سیستم چرخشی (  ) برای تعریف یک سیستم مختصات متعارف که نسبت به سیستم مرجع می چرخد استفاده کنید. در حالت دو بعدی، می توانید با استفاده از زوایای اویلر، یک زاویه چرخش درون صفحه یا یک چرخش کامل سه بعدی را مشخص کنید. در سه بعدی، زاویه های اویلر (ZXZ) تنها گزینه است.
) برای تعریف یک سیستم مختصات متعارف که نسبت به سیستم مرجع می چرخد استفاده کنید. در حالت دو بعدی، می توانید با استفاده از زوایای اویلر، یک زاویه چرخش درون صفحه یا یک چرخش کامل سه بعدی را مشخص کنید. در سه بعدی، زاویه های اویلر (ZXZ) تنها گزینه است.
چرخش های سه بعدی کامل به عنوان سه زاویه متوالی اویلر α ، β ، و γ ، با استفاده از قرارداد ZXZ مشخص می شوند. محورها و زوایای چرخش در شکل 5-4 نشان داده شده است که در آن محورهای چرخش شده سیستم X ، Y و Z نشان داده شده است.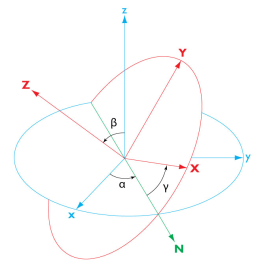
شکل 5-4: زوایای اویلر سه بعدی در یک سیستم مختصات چرخشی.
ماتریس تبدیل تعریف شده توسط زوایای اویلر، اجزای یک بردار ثابت v را از سیستم مختصات چرخشی، [ v X ، v Y ، v Z ]، به اجزایی در سیستم جهانی، [ v x ، v y ، v z ] تبدیل میکند. به شرح زیر است:

در مدلهای دوبعدی، میتوانید سیستم مختصات چرخشی را با زاویه چرخش حول محور انتخابی خارج از صفحه توصیف کنید. این یک فرآیند دو مرحله ای است. ابتدا انتخاب می کنید که کدام محور از سیستم چرخانده شده به سمت صفحه نمایش یا خارج از آن باشد. این یک جهت مرجع جدید برای محورهای باقی مانده در صفحه تعریف می کند. سپس یک زاویه چرخش نسبت به مرجع جدید را مشخص کنید.
اگر این سیستم مختصات به عنوان یک گره فرعی به یک گره سیستم ترکیبی اضافه شود، با استفاده از یک انتخاب در بخش انتخاب موجودیت هندسی ، محل فعال بودن آن را مشخص کنید . همچنین فیلدهای Name و Coordinate names در این مورد موجود نیستند.
نام مختصات
در جدول نامهای مختصات ، نامهای پیشفرض وارد میشوند – x1 ، x2 و x3 . در مدلهای دو بعدی مسطح، x1 و x2 معمولا مختصات درون صفحه هستند و x3 مختصات خارج از صفحه است.
چرخش
تنظیمات چرخش به بعد فضایی جزء که سیستم مختصات به آن تعلق دارد بستگی دارد. برای اجزای دو بعدی، ابتدا یک روش ورودی را انتخاب کنید : چرخش درون صفحه (پیشفرض) یا چرخش عمومی .
تنظیمات چرخش داخل هواپیما
هنگامی که روش ورودی روی چرخش درون صفحه در یک جزء دوبعدی تنظیم می شود، چرخش را به صورت یک زاویه (بر حسب رادیان) مشخص می کنید که چرخش حول محور خارج از صفحه را نشان می دهد. محور خارج از صفحه را می توان روی هر یک از سه محور اصلی تنظیم کرد که به داخل یا خارج از صفحه نمایش اشاره می کند. پیشفرض برای هندسههای دوبعدی مسطح، سومین خارج از صفحه است که محورهای x و y را بهعنوان محورهای مرجع درون صفحه باقی میگذارد. برای هندسههای متقارن محور، پیشفرض دوم خارج از صفحه است و محورهای r و z را در صفحه میگذارند.
تنظیمات چرخش عمومی
برای هندسه های سه بعدی و زمانی که چرخش عمومی به عنوان روش ورودی در دو بعدی انتخاب شده است، زوایای اویلر (ZXZ) (به رادیان) را در فیلدهای α ، β و γ وارد کنید ( برای تعاریف این زوایا به گرافیک در پنجره تنظیمات نگاه کنید). . مقادیر پیش فرض برای همه زوایا 0 است.
اصل و نسب
محل مبدا سیستم مختصات بردار پایه را در سیستم جهانی دکارتی مشخص کنید. پیشفرض یک مبدأ منطبق با فریمی است که از سیستم جهانی استفاده میکند و از فریم انتخاب شده از فهرست Frame استفاده میکند (پیشفرض: فضایی ).
نسبت به سیستم از هندسه
اگر صفحه کاری را به هندسه اضافه کرده باشید، این بخش به صورت سه بعدی در دسترس است.
از لیست صفحه کار ، xy-plane (پیشفرض، برای یک سیستم مختصات دکارتی استاندارد جهانی) را انتخاب کنید یا هر صفحه کاری را در دنباله هندسه انتخاب کنید. اگر صفحه کاری را انتخاب کنید، مختصات xw , yw و zw صفحه کار برای تعریف سیستم چرخشی استفاده می شود.
|
|
برای اطلاعات در مورد پنجره تنظیمات Label and Name به Name بروید . همچنین تنظیمات و ویژگیهای ویندوز برای گرههای ویژه را ببینید.
|
|
|
با ماژول MEMS، به Gecko Foot مراجعه کنید : مسیر کتابخانه برنامه MEMS_Module/Actuators/gecko_foot .
|



