
یک سیستم بردار پایه (  ) را با استفاده از مجموعه ای از بردارهای پایه برای تشکیل یک سیستم مختصات تعریف کنید. سیستم لزوماً نیازی به متعامد بودن ندارد، اما زمانی که چنین است، اعلام آن به صورت متعارف و خطی، سادهسازیهایی را امکانپذیر میکند که عملکرد را بهبود میبخشد.
) را با استفاده از مجموعه ای از بردارهای پایه برای تشکیل یک سیستم مختصات تعریف کنید. سیستم لزوماً نیازی به متعامد بودن ندارد، اما زمانی که چنین است، اعلام آن به صورت متعارف و خطی، سادهسازیهایی را امکانپذیر میکند که عملکرد را بهبود میبخشد.
یک بردار F با مولفه های متناقض آن [ F 1 , F 2 , F 3 ] T در پایه سیستم بردار پایه جدید که توسط بردارهای پایه u 1 , u 2 و u 3 به شکل F = F 1 تعریف شده است نشان داده می شود. u 1 + F 2 u 2 + F 3 u 3 . بیان بردارهای پایه به عنوان اجزاء در یک سیستم دیگر (به عنوان مثال، سیستم فضایی جهانی [ ex ,e y , e z ]) ماتریس تبدیل بین پایه ها را نشان می دهد:
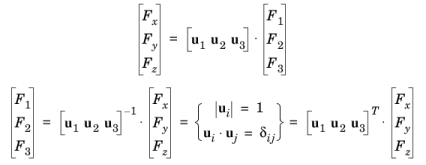
زمانی که سیستم بردار پایه متعامد باشد آخرین تساوی برقرار است.
توجه داشته باشید که بردارهای پایه را به عنوان اجزاء در سیستم مختصات جهانی پیش فرض که وابسته به زمینه است، مشخص می کنید. بنابراین سیستم بردار پایه یک سیستم مختصات نسبی است که تفسیر آن به تفسیر سیستم جهانی در شرایط فعلی بستگی دارد.
|
|
رابط منحنی مختصات می تواند سیستم های بردار پایه خاصی را در گره های سیستم منحنی
|
اگر این سیستم مختصات به عنوان یک گره فرعی به یک گره سیستم ترکیبی اضافه شود، با استفاده از یک انتخاب در بخش انتخاب موجودیت هندسی ، محل فعال بودن آن را مشخص کنید . همچنین فیلدهای Name و Coordinate names در این مورد موجود نیستند.
نام مختصات
در جدول نامهای مختصات ، نامهای پیشفرض در قسمت اول ، دوم و سوم وارد میشوند – به ترتیب x1 ، x2 و x3 . در مدلهای دو بعدی مسطح، x1 و x2 معمولا مختصات درون صفحه هستند و x3 مختصات خارج از صفحه است. برای ویرایش نام ها روی سلول های جدول کلیک کنید.
بردارهای پایه
بردارهای پایه را بر حسب مختصات دکارتی جهانی (معمولا x ، y ، و z ) تعریف کنید. یک بردار پایه در هر ردیف (دو بردار برای دو بعدی و سه بردار برای سه بعدی).
|
|
برای مدل های 1 بعدی، انتخاب کنید که کدام بردار پایه موازی با هندسه 1 بعدی باشد. یک گزینه را از لیست فهرست In-plane انتخاب کنید. پیش فرض 1 است.
|
|
|
برای مدلهای دوبعدی، بردار پایه را برای محاسبه بهعنوان حاصل ضرب متقاطع دو بردار درون صفحه مشخص شده انتخاب کنید. یک گزینه را از لیست فهرست خارج از صفحه انتخاب کنید. پیشفرضها 3 برای مدل 2 بعدی صفحه و 2 برای مدل دو بعدی متقارن محوری هستند. به عنوان مثال، برای نگاشت اولین بردار، x1 ، به جهتی که با y = x در 2D تعریف شده است، 1 را در فیلدهای زیر x و y در ردیف x1 وارد کنید.
|
ساده سازی ها
برای برخی از کاربردها، فقط می توان از سیستم های مختصات متعارف استفاده کرد. از آنجا که بردارهای پایه وارد شده در گره سیستم بردار پایه لزوماً متعارف نیستند، این سیستم ها به طور پیش فرض در زمینه هایی که نیاز به قاعده مندی دارند مجاز نیستند. برای در دسترس قرار دادن سیستم مختصات در چنین زمینههایی، چک باکس Assume orthonormal یا Make orthonormal را انتخاب کنید. اولی به تبدیلهای متغیر خودکار دستور میدهد که از بردارهای پایه وارد شده مستقیماً استفاده کنند، اما آنها را بهعنوان متعارف در نظر بگیرند – اگر اینطور نباشند، نتایج نادرست خواهند بود. ساخت متعارفچک باکس تجزیه قطبی ماتریس بردار پایه را به یک ماتریس چرخشی و یک ماتریس کششی امکان پذیر می کند. ماتریس چرخش – که متعارف است – حفظ می شود، در حالی که ماتریس کششی دور انداخته می شود. این روش از نظر محاسباتی گرانتر از فرض متعارف بودن است، اما یک ماتریس تبدیل متعارف واقعی را تضمین می کند که در تبدیل متغیرهای بعدی به درستی رفتار می کند.
اصل و نسب
محل مبدا سیستم مختصات بردار پایه را در سیستم جهانی دکارتی مشخص کنید. پیشفرض یک مبدأ منطبق با فریمی است که از سیستم جهانی استفاده میکند و از فریم انتخاب شده از فهرست Frame استفاده میکند (پیشفرض: فضایی ).
نسبت به سیستم از هندسه
در صورتی که صفحه کاری به هندسه اضافه کرده باشید، این بخش به صورت سه بعدی در دسترس است.
از لیست صفحه کار ، xy-plane (پیشفرض، برای یک سیستم مختصات دکارتی استاندارد جهانی) را انتخاب کنید یا هر صفحه کاری را در دنباله هندسه انتخاب کنید. اگر صفحه کاری را انتخاب کنید، مختصات xw , yw و zw صفحه کار برای تعریف بردار پایه استفاده می شود.
|
|
برای اطلاعات در مورد پنجره تنظیمات Label and Name به Name بروید . همچنین تنظیمات و ویژگیهای ویندوز برای گرههای ویژه را ببینید.
|
|
|
|



