
دینامیک چرخ دنده های حلزونی
معرفی
این مدل دینامیک چرخ دنده های مارپیچ را نشان می دهد. این با استفاده از عملکرد چرخ دنده در رابط Multibody Dynamics در COMSOL Multiphysics ساخته شده است.
یک مطالعه گذرا برای تجزیه و تحلیل اثر سفتی مش دنده ثابت، سفتی مش دنده متغیر، و خطای انتقال بر سرعت زاویهای دنده محرک و نیروی تماس انجام میشود. تجزیه و تحلیل فرکانس ویژه برای محاسبه فرکانس های طبیعی و شکل حالت جفت چرخ دنده برای مش دنده صلب و الاستیک انجام می شود.
تعریف مدل
هندسه چرخ دنده های مارپیچ نشان داده شده در شکل 1 .
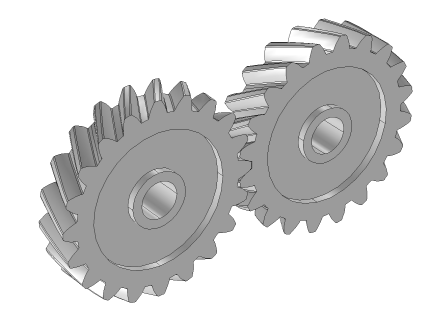
شکل 1: هندسه مدل.
خواص چرخ دنده
خواص چرخ و پینیون در جدول زیر آورده شده است:
خواص | چرخ | پینیون | |
تعداد دندان ها | n | 20 | 20 |
قطر گام | d p | 100 میلی متر | 100 میلی متر |
زاویه فشار | آ | 25 درجه | 25 درجه |
زاویه مارپیچ | ب | 30 درجه | -30 درجه |
مرکز چرخش | x c | (0، 0، 0) میلی متر | (100، 0، 0) میلی متر |
محور چرخش | eg _ | (0، 1، 0) | (0، 1، 0) |
تحلیل وابسته به زمان
تجزیه و تحلیل وابسته به زمان برای تجزیه و تحلیل دینامیک چرخ دنده های مارپیچ انجام می شود. هنگام محاسبه نیروی تماس و سرعت چرخ دنده رانده، مش های دنده زیر در نظر گرفته می شوند:
• | مش دنده سفت و سخت |
• | توری دنده الاستیک با سفتی ثابت |
• | مش دنده الاستیک با سفتی متفاوت |
• | توری دنده الاستیک با سفتی ثابت و خطای انتقال |
در تمام موارد، دنده راننده با سرعت زاویه ای 100 راد بر ثانیه می چرخد و گشتاور مقاومتی 10 نیوتن متر به دنده محرک اعمال می شود. آنالیز برای 3 سیکل مش انجام می شود و تعداد مراحل زمانی در هر سیکل مش 50 است .
مورد-1: مش دنده سفت و سخت
در این حالت، مش دنده صلب فرض می شود و هیچ انعطافی در سیستم وجود ندارد.
مورد-2: مش دنده الاستیک با سفتی ثابت
در این حالت، مش دنده الاستیک در نظر گرفته می شود. سفتی دندان دنده 107 نیوتن بر متر است. نسبت تماس در یک سیکل مش ثابت فرض می شود. میرایی مش دنده نیز اضافه شده است و 0.05 درصد سفتی مش است.
مورد-3: مش دنده الاستیک با سفتی متفاوت
این مورد مشابه مورد 1 است . با این حال، در این مورد نسبت تماس در یک چرخه مش متغیر است. حداکثر نسبت تماس در سیکل مش 2 و موقعیت درگیری دندان بعدی در سیکل مش 0.8 است. تغییر سفتی مش جفت چرخ دنده در یک چرخه مش در شکل 2 نشان داده شده است .
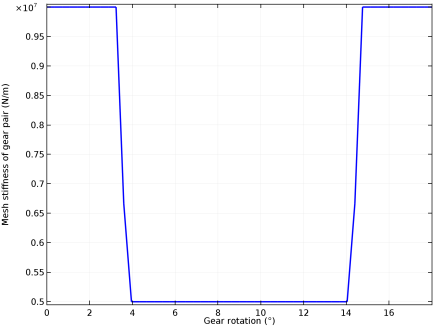
شکل 2: تغییر سفتی مش در یک چرخه مش (مورد-3).
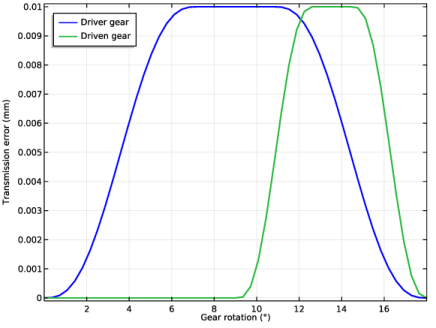
شکل 3: تغییر خطای انتقال در یک سیکل مش (مورد-4).
مورد-4: مش دنده الاستیک با سفتی ثابت و خطای انتقال
این مورد مشابه مورد- 1 است . اما در این حالت خطای انتقال استاتیک نیز در هر دو دنده اضافه می شود. حداکثر خطای انتقال استاتیک در هر دنده 0.01 میلی متر است. تغییر خطای انتقال در هر چرخ دنده در یک سیکل مش در شکل 3 نشان داده شده است .
تجزیه و تحلیل فرکانس ویژه
تجزیه و تحلیل فرکانس ویژه برای محاسبه فرکانس های طبیعی و شکل حالت جفت چرخ دنده مارپیچ انجام می شود. مش های چرخ دنده زیر در نظر گرفته می شوند:
• | مش دنده سفت و سخت |
• | توری دنده الاستیک با سفتی ثابت |
در تمام موارد، هر دو چرخ دنده آزادند تا حول محور خود بچرخند. چرخ دنده رانده روی یک مفصل الاستیک نصب شده است. سفتی انتقالی و چرخشی مفصل الاستیک به ترتیب 2·10 7 N/m و 2·10 7 Nm/rad است.
نتایج و بحث
تحلیل وابسته به زمان
سرعت زاویه ای پینیون یا چرخ دنده محرک برای شبکه های چرخ دنده مختلف در شکل 4 نشان داده شده است . مشاهده می شود که برای مش دنده صلب، سرعت زاویه ای دنده محرک ثابت است. برای حالت سفتی ثابت، سرعت زاویهای چرخ دنده رانده در ابتدا نوسان میکند و پس از مدتی به مقدار متوسط میرسد.
برای موارد مختلف سفتی یا خطای انتقال، سرعت زاویه ای دنده رانده با چرخش دنده تغییر می کند. تغییر سرعت زاویه ای دوره ای است و در سیکل مش بعدی تکرار می شود.
شکل 5 تغییر نیروی تماس را برای مش دنده های مختلف نشان می دهد. مشاهده می شود که برای مش دنده صلب، نیروی تماس دارای مقدار ثابت 254.8 نیوتن است. برای حالت سفتی ثابت، نیروی تماس در ابتدا نوسان می کند و پس از مدتی به مقدار متوسط می رسد.
برای موارد سفتی متفاوت، نیروی تماس با چرخش دنده تغییر می کند. تغییر نیروی تماس دوره ای است و در سیکل مش بعدی تکرار می شود. حداکثر و حداقل مقدار نیروی تماس در یک سیکل مش تقریباً 440 نیوتن و 150 نیوتن است. برای مورد خطای انتقال، رفتار نیروی تماس مشابه با حالت سفتی متفاوت است.
شکل 6 و شکل 7 تغییرات نیروهای واکنش و گشتاورهای واکنش را در مرکز دنده محرک برای مش دنده با سفتی متفاوت نشان می دهد.
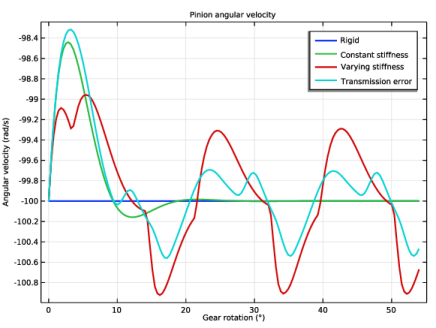
شکل 4: تغییر سرعت زاویه ای پینیون با چرخش چرخ دنده.

شکل 5: تغییر نیروی تماس با چرخش دنده.
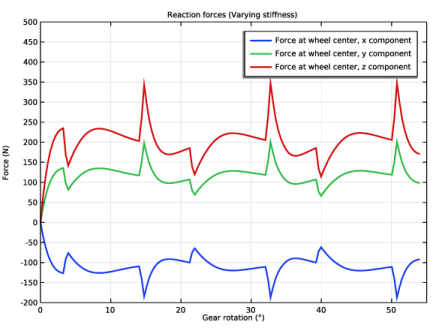
شکل 6: نیروهای واکنش در مرکز چرخ دنده راننده (مورد-3).
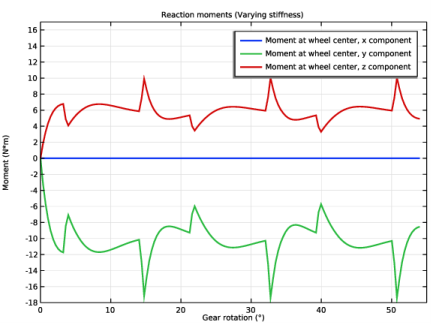
شکل 7: لحظات واکنش در مرکز چرخ دنده راننده (مورد-3).
تجزیه و تحلیل فرکانس ویژه
نتایج تجزیه و تحلیل فرکانس ویژه، برای هر دو مش دنده، در زیر آورده شده است:
شماره حالت | فرکانس طبیعی (مش سخت) (HZ) | فرکانس طبیعی (مش الاستیک) (HZ) | نوع حالت |
اولین | 0* | 0* | چرخش بدنه صلب |
دومین | – | 293.7+583.2i | پیچش توری دنده |
سوم | 601.3 | 590.3+71.7i | مفصل الاستیک: چرخش |
چهارم | 728.1 | 728.1 | مفصل الاستیک: ترجمه |
پنجم | 728.1 | 728.1 | مفصل الاستیک: ترجمه |
ششم | 2417 | 2669+143.5i | مفصل الاستیک: چرخش |
* در حالت ایده آل فرکانس چرخش بدنه صلب باید صفر باشد. اما به دلیل اشتباهات عددی کوچک، دقیقاً صفر نیست بلکه بسیار نزدیک به صفر است.
در جدول 2 مشاهده می شود که حالت دوم فقط زمانی وجود دارد که توری دنده الاستیک باشد. این حالت مربوط به پیچش توری چرخ دنده است. بقیه حالت هایی که مربوط به جابجایی و چرخش مفصل الاستیک است برای هر دو مش دنده وجود دارد. مشاهده می شود که کشش توری چرخ دنده فقط بر حالت های چرخشی تأثیر می گذارد. حالت های ترجمه در هر دو مورد یکسان است.
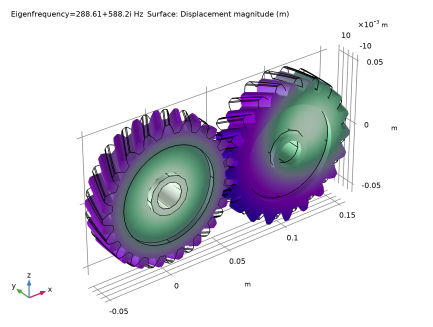
شکل 8: حالت دوم جفت چرخ دنده مارپیچ با مش الاستیک.

شکل 9: حالت ششم جفت چرخ دنده مارپیچی با مش الاستیک.
نکاتی درباره پیاده سازی COMSOL
• | برای ساخت هندسه چرخ دنده، می توانید یک قطعه چرخ دنده را از کتابخانه قطعات وارد کرده و با تغییر پارامترهای ورودی آن را سفارشی کنید. همچنین می توانید یک دیسک یا مخروط معادل برای نشان دادن چرخ دنده ایجاد کنید. |
• | همه دنده ها سفت فرض می شوند. الاستیسیته یک توری چرخ دنده را می توان با استفاده از زیرگره Gear Elasticity در گره های Gear Pair گنجاند . |
• | تمام گره های Gear Pair ایده آل و بدون اصطکاک فرض می شوند. در صورت نیاز میتوانید زیرگرههای خطای انتقال ، بکلش یا اصطکاک را اضافه کنید. |
• | برای محدود کردن حرکت یک چرخ دنده، میتوانید از زیرگرههای Desplacement/Rotation یا Fixed Constraint استفاده کنید . از طرف دیگر، میتوانید چرخدندهها را از طریق گرههای مختلف مشترک روی یک شفت یا روی زمین نصب کنید . |
• | نیروی تماس در یک جفت دنده با استفاده از محدودیت های ضعیف یا روش مجازات محاسبه می شود . به طور پیش فرض، محاسبه نیروی تماس خاموش است. برای نیروهای تماس دقیق تر از روش محدودیت های ضعیف استفاده کنید. با این حال، شما ترجیحاً روش جریمه را برای سیستم های بدنه سفت و سخت بزرگ انتخاب کنید. |
مسیر کتابخانه برنامه: Multibody_Dynamics_Module/Tutorials,_Transmission/helical_gear_pair
دستورالعمل مدلسازی
از منوی File ، New را انتخاب کنید .
جدید
در پنجره جدید ، روی  Model Wizard کلیک کنید .
Model Wizard کلیک کنید .
مدل جادوگر
1 | در پنجره Model Wizard ، روی |
2 | در درخت Select Physics ، Structural Mechanics>Multibody Dynamics (mbd) را انتخاب کنید . |
3 | روی افزودن کلیک کنید . |
4 |
5 | در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
6 |
تعاریف جهانی
پارامترهای 1
1 | در پنجره Model Builder ، در قسمت Global Definitions روی Parameters 1 کلیک کنید . |
2 | در پنجره تنظیمات برای پارامترها ، بخش پارامترها را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل helical_gear_pair_parameters.txt دوبار کلیک کنید . |
کتابخانه های بخش
1 | در نوار ابزار Home ، روی |
2 | در پنجره Part Libraries ، Multibody Dynamics Module>3D>External Gears>helical_gear را در درخت انتخاب کنید . |
3 |
هندسه 1
Helical Gear 1 (pi1)
1 | در نوار ابزار Home ، روی |
برای سفارشی کردن هندسه چرخ دنده، پارامترهای چرخ دنده را در پارامترهای ورودی قطعه وارد کنید.
2 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Helical Gear 1 (pi1) کلیک کنید . |
3 | در پنجره تنظیمات برای نمونه قسمت ، قسمت پارامترهای ورودی را پیدا کنید . |
4 | در جدول تنظیمات زیر را وارد کنید: |
نام | اصطلاح | ارزش | شرح |
n | n | 20 | تعداد دندان ها |
dp | dp | 0.1 متر | قطر گام |
آلفا | آلفا | 25 درجه | زاویه فشار |
بتا | بتا | 30 درجه | زاویه مارپیچ |
lsr | 0 | 0 | نسبت طول شفت به قطر گام (تنظیم 0 برای بدون شفت) |
یکی | 1 | 1 | محور چرخ دنده، جزء y |
کپی ها | 0 | 0 | محور دنده، جزء z |
Helical Gear 2 (pi2)
1 | در نوار ابزار هندسه ، روی |
2 | در پنجره تنظیمات برای نمونه قسمت ، قسمت پارامترهای ورودی را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
نام | اصطلاح | ارزش | شرح |
n | n | 20 | تعداد دندان ها |
dp | dp | 0.1 متر | قطر گام |
آلفا | آلفا | 25 درجه | زاویه فشار |
بتا | -بتا | -30 درجه | زاویه مارپیچ |
lsr | 0 | 0 | نسبت طول شفت به قطر گام (تنظیم 0 برای بدون شفت) |
xc | dp | 0.1 متر | مرکز دنده، مختصات x |
یکی | 1 | 1 | محور چرخ دنده، جزء y |
کپی ها | 0 | 0 | محور دنده، جزء z |
هفتم | 360/(2*n)[درجه] | 9 درجه | زاویه تراز مش |
فرم اتحادیه (فین)
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Form Union (fin) کلیک کنید . |
2 | در پنجره تنظیمات Form Union/Assembly ، بخش Form Union/Assembly را پیدا کنید . |
3 | از لیست Action ، Form an assembly را انتخاب کنید . |
4 | تیک Create Pairs را پاک کنید . |
5 | در نوار ابزار Geometry ، روی |
توابع Rectangle را برای استفاده از آنها در عبارات خطای انتقال تعریف کنید .
تعاریف
مستطیل 1 (راست1)
1 | در نوار ابزار Home ، روی |
2 | در پنجره تنظیمات برای Rectangle ، بخش Parameters را پیدا کنید . |
3 | در قسمت متنی Lower limit 0.2 را تایپ کنید . |
4 | در قسمت متنی حد بالا ، 0.8 را تایپ کنید . |
5 | برای گسترش بخش Smoothing کلیک کنید . در قسمت متنی Size of transition zone ، 0.4 را تایپ کنید . |
مستطیل 2 (مست2)
1 | در نوار ابزار Home ، روی |
2 | در پنجره تنظیمات برای Rectangle ، بخش Parameters را پیدا کنید . |
3 | در قسمت متنی Lower limit 0.6 را تایپ کنید . |
4 | در قسمت متنی حد بالا ، 0.9 را تایپ کنید . |
5 | بخش Smoothing را پیدا کنید . در قسمت متنی Size of transition zone ، 0.2 را تایپ کنید . |
مواد را اضافه کنید
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Material بروید . |
3 | در درخت، Built-in>Structural steel را انتخاب کنید . |
4 | روی Add to Component در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
MULTIBODY DYNAMICS (MBD)
گره های چرخ دنده هلیکال را اضافه کنید و ویژگی های چرخ دنده را مشخص کنید. برای ایجاد خودکار گرههای چرخ دنده هلیکال از قسمتهای هندسی، از بخش تنظیم خودکار مدل گره Multibody Dynamics استفاده کنید.
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Multibody Dynamics (mbd) کلیک کنید . |
2 | در پنجره تنظیمات برای Multibody Dynamics ، روی Physics Node Generation در گوشه سمت راست بالای بخش Automated Model Setup کلیک کنید . از منو، Create Gears را انتخاب کنید . |
چرخ دنده هلیکال 1
1 | در پنجره Model Builder ، گره Gears را گسترش دهید ، سپس روی Helical Gear 1 کلیک کنید . |
2 | در پنجره تنظیمات برای Helical Gear ، بخش مقادیر اولیه را پیدا کنید . |
3 | از لیست، Locally defined را انتخاب کنید . |
مقادیر اولیه 1
1 | در پنجره Model Builder ، روی مقادیر اولیه 1 کلیک کنید . |
2 | در پنجره تنظیمات مقادیر اولیه ، قسمت مقادیر اولیه : چرخشی را پیدا کنید . |
3 | بردار ω را به صورت مشخص کنید |
0 | ایکس |
امگا | y |
0 | z |
چرخ دنده هلیکال 2
1 | در پنجره Model Builder ، گره Component 1 (comp1)>Multibody Dynamics (mbd)>Gears>Helical Gear 2 را گسترش دهید ، سپس روی Helical Gear 2 کلیک کنید . |
2 | در پنجره تنظیمات برای Helical Gear ، بخش مرکز چرخش را پیدا کنید . |
3 | بردار X c را به صورت مشخص کنید |
dp | ایکس |
0 | y |
0 | z |
4 | قسمت مقادیر اولیه را پیدا کنید . از لیست، Locally defined را انتخاب کنید . |
مقادیر اولیه 1
1 | در پنجره Model Builder ، روی مقادیر اولیه 1 کلیک کنید . |
2 | در پنجره تنظیمات مقادیر اولیه ، قسمت مقادیر اولیه : چرخشی را پیدا کنید . |
3 | بردار ω را به صورت مشخص کنید |
0 | ایکس |
-امگا | y |
0 | z |
برای اتصال دو چرخ دنده به زمین، اتصالات لولا را اضافه کنید .
مفصل لولا: دنده ثابت 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، در فیلد نوشتار Label ، لنگه مفصل: Fixed-Gear 1 را تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از لیست منبع ، ثابت را انتخاب کنید . |
4 | از لیست مقصد ، Helical Gear 1 را انتخاب کنید . |
5 | قسمت Axis of Joint را پیدا کنید . بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
1 | y |
0 | z |
مفصل لولا: دنده ثابت 2
1 | روی Hinge Joint: Fixed-Gear 1 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، در فیلد نوشتاری Label ، لنگه مفصل: Fixed-Gear 2 را تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از لیست مقصد ، Helical Gear 2 را انتخاب کنید . |
مفصل لولا: دنده ثابت 2 (الاستیک)
1 | روی Hinge Joint: Fixed-Gear 2 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، در فیلد نوشتار برچسب ، اتصال مفصل: ثابت-دنده 2 (الاستیک) را تایپ کنید . |
3 | قسمت Joint Elasticity را پیدا کنید . از لیست، اتصال الاستیک را انتخاب کنید . |
خاصیت ارتجاعی مفصل 1
1 | در پنجره Model Builder ، روی Joint Elasticity 1 کلیک کنید . |
2 | در پنجره تنظیمات برای Joint Elasticity ، بخش Spring را پیدا کنید . |
3 | در قسمت متن k u ، ku را تایپ کنید . |
4 | در قسمت متن k θ ، kth را تایپ کنید . |
مفصل لولا: دنده ثابت 1
حرکت چرخ را تجویز کنید.
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی لولا Joint: Fixed-Gear 1 کلیک کنید . |
حرکت تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای حرکت تجویز شده ، قسمت حرکت چرخشی تجویز شده را پیدا کنید . |
3 | از لیست حرکت تجویز شده ، سرعت زاویه ای را انتخاب کنید . |
4 | در قسمت متن ω p ، omega را تایپ کنید . |
مفصل لولا: دنده ثابت 2
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Long Joint: Fixed-Gear 2 کلیک کنید .
نیروی اعمالی و لحظه 1
1 | در نوار ابزار Physics ، روی |
گشتاور مقاوم را روی پینیون اعمال کنید.
2 | در پنجره تنظیمات برای نیروی اعمال شده و لحظه ، بخش Applied On را پیدا کنید . |
3 | از لیست، Joint را انتخاب کنید . |
4 | بخش نیروی اعمال شده و لحظه را پیدا کنید . در قسمت متن M ، T_ext را تایپ کنید . |
از چندین گره Gear Pair با خواص مختلف برای اتصال دو چرخ دنده در موارد مختلف استفاده کنید.
جفت دنده: صلب
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Gear Pair ، در قسمت نوشتار Label ، Gear Pair: Rigid را تایپ کنید . |
3 | بخش انتخاب دنده را پیدا کنید . از لیست چرخ ، Helical Gear 1 را انتخاب کنید . |
4 | از لیست Pinion ، Helical Gear 2 را انتخاب کنید . |
5 | بخش محاسبه نیروی تماس را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
جفت دنده: سفتی ثابت
1 | روی Gear Pair: Rigid کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای جفت چرخ دنده ، جفت چرخ دنده: سختی ثابت را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Gear Pair Properties را پیدا کنید . تیک Include Gear elasticity را انتخاب کنید . |
جفت دنده: سفتی متغیر
1 | روی Gear Pair: Constant Stiffness کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای جفت چرخ دنده ، جفت دنده: سختی متغیر را در قسمت نوشتار برچسب تایپ کنید . |
جفت دنده: خطای گیربکس
1 | روی Gear Pair: Varying Stiffness کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات مربوط به Gear Pair ، در قسمت نوشتار Label ، Gear Pair: Transmission Error را تایپ کنید . |
3 | قسمت Gear Pair Properties را پیدا کنید . تیک گزینه Include transmission error را انتخاب کنید . |
کشش دنده 1
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd)>Gear Pair: Constant Stiffness روی Gear Elasticity 1 کلیک کنید . |
2 | در پنجره تنظیمات برای الاستیسیته دنده ، بخش سختی مش را پیدا کنید . |
3 | در قسمت متن k t,wh ، kt را تایپ کنید . |
4 | در قسمت متن k t,pn ، kt را تایپ کنید . |
5 | قسمت Mesh Damping را پیدا کنید . در قسمت متن c g ، (ct[s]/100)*mbd.grp2.kg را تایپ کنید . |
کشش دنده 1
1 | در پنجره Model Builder ، گره Component 1 (comp1)>Multibody Dynamics (mbd)>Gear Pair: Varying Stiffness را گسترش دهید ، سپس روی Gear Elasticity 1 کلیک کنید . |
2 | در پنجره تنظیمات برای الاستیسیته دنده ، بخش سختی مش را پیدا کنید . |
3 | در قسمت متن k t,wh ، kt را تایپ کنید . |
4 | در قسمت متن k t,pn ، kt را تایپ کنید . |
5 | از نسبت تماس در لیست چرخه مش ، متغیر را انتخاب کنید . |
6 | در قسمت متن ζ ، 0.8 را تایپ کنید . |
7 | قسمت Mesh Damping را پیدا کنید . در قسمت متن c g ، (ct[s]/100)*mbd.grp3.kg را تایپ کنید . |
کشش دنده 1
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd)>Gear Pair: Transmission Error روی Gear Elasticity 1 کلیک کنید . |
2 | در پنجره تنظیمات برای الاستیسیته دنده ، بخش سختی مش را پیدا کنید . |
3 | در قسمت متن k t,wh ، kt را تایپ کنید . |
4 | در قسمت متن k t,pn ، kt را تایپ کنید . |
5 | قسمت Mesh Damping را پیدا کنید . در قسمت متن c g ، (ct[s]/100)*mbd.grp4.kg را تایپ کنید . |
خطای انتقال 1
1 | در پنجره Model Builder ، روی Transmission Error 1 کلیک کنید . |
2 | در پنجره تنظیمات مربوط به خطای انتقال ، قسمت خطای انتقال را پیدا کنید . |
3 | در قسمت متن e wh ، et*rect1(mbd.grp4.thm_wh/(2*pi/n)) را تایپ کنید . |
4 | در قسمت متن e pn ، et*rect2(mbd.grp4.thm_pn/(2*pi/n)) را تایپ کنید . |
مش 1
در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Mesh 1 کلیک راست کرده و Build All را انتخاب کنید .
جواب را برای یک جفت صلب محاسبه کنید.
مطالعه 1: گذرا (سخت)
1 | در پنجره Model Builder ، روی Study 1 کلیک کنید . |
2 | در پنجره تنظیمات برای مطالعه ، Study 1: را در قسمت نوشتار Label تایپ کنید . |
3 | در قسمت Label text Study 1: Transient (Rigid) را تایپ کنید . |
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در مطالعه 1: Transient (Rigid) روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
3 | در قسمت متنی زمان خروجی ، range(0,dT,T) را تایپ کنید . |
4 | از لیست Tolerance ، User controlled را انتخاب کنید . |
5 | در قسمت متنی Relative tolerance ، 1e-6 را تایپ کنید . |
6 | قسمت Physics and Variables Selection را پیدا کنید . تیک Modify model configuration for study step را انتخاب کنید . |
7 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame> Hong Joint: Fixed-Gear 2 (Elastic) , Component 1 (comp1)> Multibody Dynamics (mbd)، Frame Spatial Controls > Gear Pair را انتخاب کنید. : سفتی ثابت ، مؤلفه 1 (comp1)> دینامیک چند بدنه (mbd)، قاب فضایی کنترل > جفت چرخ دنده: سختی متغیر ، و مؤلفه 1 (comp1) > چند بدنه Dynamics (mbd)، قاب فضایی را کنترل می کند > جفت دنده: خطای انتقال . |
8 |
راه حل 1 (sol1)
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره Model Builder ، گره Solution 1 (sol1) را گسترش دهید ، سپس روی Time-Dependent Solver 1 کلیک کنید . |
3 | در پنجره تنظیمات برای حل وابسته به زمان ، برای گسترش بخش تحمل مطلق کلیک کنید . |
4 | از لیست روش تحمل ، دستی را انتخاب کنید . |
5 | در نوار ابزار مطالعه ، |
نتایج
جابجایی (mbd)
یک مطالعه وابسته به زمان دیگر اضافه کنید و راه حل یک جفت چرخ دنده با سفتی ثابت را محاسبه کنید.
اضافه کردن مطالعه
1 | در نوار ابزار مطالعه ، روی |
2 | به پنجره Add Study بروید . |
3 | زیربخش مطالعات را پیدا کنید . در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
4 | روی Add Study در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار مطالعه ، روی |
مطالعه 2: گذرا (سفتی ثابت)
1 | در پنجره Model Builder ، روی Study 2 کلیک کنید . |
2 | در پنجره تنظیمات برای مطالعه ، Study 2: Transient (Stiffness Constant) را در قسمت نوشتار Label تایپ کنید . |
3 | بخش تنظیمات مطالعه را پیدا کنید . تیک Generate defaults defaults را پاک کنید . |
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در مطالعه 2: گذرا ( سفتی ثابت) روی مرحله 1: وابسته به زمان کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
3 | در قسمت متنی زمان خروجی ، range(0,dT,T) را تایپ کنید . |
4 | از لیست Tolerance ، User controlled را انتخاب کنید . |
5 | در قسمت متنی Relative tolerance ، 1e-6 را تایپ کنید . |
6 | قسمت Physics and Variables Selection را پیدا کنید . تیک Modify model configuration for study step را انتخاب کنید . |
7 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame> Hong Joint: Fixed-Gear 2 (Elastic) , Component 1 (comp1)> Multibody Dynamics (mbd)، Frame Spatial Controls > Gear Pair را انتخاب کنید. : صلب ، مؤلفه 1 (comp1)> دینامیک چند بدنه (mbd)، قاب فضایی کنترل > جفت دنده : سختی متغیر ، و مؤلفه 1 (comp1) > دینامیک چند بدنه (mbd)، قاب فضایی > جفت دنده را کنترل می کند : خطای انتقال . |
8 |
راه حل 2 (sol2)
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره Model Builder ، گره Solution 2 (sol2) را گسترش دهید ، سپس روی Time-Dependent Solver 1 کلیک کنید . |
3 | در پنجره تنظیمات برای حل وابسته به زمان ، بخش تحمل مطلق را پیدا کنید . |
4 | از لیست روش تحمل ، دستی را انتخاب کنید . |
5 | در نوار ابزار مطالعه ، |
یک مطالعه وابسته به زمان دیگر اضافه کنید و راه حل را برای یک جفت چرخ دنده با سفتی متفاوت محاسبه کنید.
اضافه کردن مطالعه
1 | در نوار ابزار مطالعه ، روی |
2 | به پنجره Add Study بروید . |
3 | زیربخش مطالعات را پیدا کنید . در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
4 | روی Add Study در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار مطالعه ، روی |
مطالعه 3: گذرا (سفتی متغیر)
1 | در پنجره Model Builder ، روی Study 3 کلیک کنید . |
2 | در پنجره تنظیمات برای مطالعه ، Study 3: Transient (Varying Stiffness) را در قسمت نوشتار Label تایپ کنید . |
3 | بخش تنظیمات مطالعه را پیدا کنید . تیک Generate defaults defaults را پاک کنید . |
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در مطالعه 3: Transient (Varying Stiffness) روی مرحله 1: وابسته به زمان کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
3 | در قسمت متنی زمان خروجی ، range(0,dT,T) را تایپ کنید . |
4 | از لیست Tolerance ، User controlled را انتخاب کنید . |
5 | در قسمت متنی Relative tolerance ، 1e-6 را تایپ کنید . |
6 | قسمت Physics and Variables Selection را پیدا کنید . تیک Modify model configuration for study step را انتخاب کنید . |
7 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame> Hong Joint: Fixed-Gear 2 (Elastic) , Component 1 (comp1)> Multibody Dynamics (mbd)، Frame Spatial Controls > Gear Pair را انتخاب کنید. : صلب ، مؤلفه 1 (comp1)> دینامیک چند بدنه (mbd)، قاب فضایی کنترل > جفت چرخ دنده: سختی ثابت ، و مؤلفه 1 (comp1) > دینامیک چند بدنه (mbd)، قاب فضایی > جفت دنده را کنترل می کند : خطای انتقال . |
8 |
راه حل 3 (sol3)
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره Model Builder ، گره Solution 3 (sol3) را گسترش دهید ، سپس روی Time-Dependent Solver 1 کلیک کنید . |
3 | در پنجره تنظیمات برای حل وابسته به زمان ، بخش تحمل مطلق را پیدا کنید . |
4 | از لیست روش تحمل ، دستی را انتخاب کنید . |
5 | در نوار ابزار مطالعه ، |
یک مطالعه وابسته به زمان دیگر اضافه کنید و راه حل یک جفت دنده با خطای انتقال را محاسبه کنید.
اضافه کردن مطالعه
1 | در نوار ابزار مطالعه ، روی |
2 | به پنجره Add Study بروید . |
3 | زیربخش مطالعات را پیدا کنید . در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
4 | روی Add Study در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار مطالعه ، روی |
مطالعه 4: گذرا (خطای انتقال)
1 | در پنجره Model Builder ، روی Study 4 کلیک کنید . |
2 | در پنجره تنظیمات برای مطالعه ، Study 4: Transient (Transmission Error) را در قسمت نوشتار Label تایپ کنید . |
3 | بخش تنظیمات مطالعه را پیدا کنید . تیک Generate defaults defaults را پاک کنید . |
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در مطالعه 4: گذرا (خطای انتقال ) روی مرحله 1: وابسته به زمان کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
3 | در قسمت متنی زمان خروجی ، range(0,dT,T) را تایپ کنید . |
4 | از لیست Tolerance ، User controlled را انتخاب کنید . |
5 | در قسمت متنی Relative tolerance ، 1e-6 را تایپ کنید . |
6 | قسمت Physics and Variables Selection را پیدا کنید . تیک Modify model configuration for study step را انتخاب کنید . |
7 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame> Hong Joint: Fixed-Gear 2 (Elastic) , Component 1 (comp1)> Multibody Dynamics (mbd)، Frame Spatial Controls > Gear Pair را انتخاب کنید. : صلب ، مؤلفه 1 (comp1)> دینامیک چند بدنه (mbd)، قاب فضایی کنترل > جفت چرخ دنده: سختی ثابت ، و مؤلفه 1 (comp1) > دینامیک چند بدنه (mbd)، قاب فضایی را کنترل می کند > جفت چرخ دنده: سختی متغیر . |
8 |
راه حل 4 (sol4)
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره Model Builder ، گره Solution 4 (sol4) را گسترش دهید ، سپس روی Time-Dependent Solver 1 کلیک کنید . |
3 | در پنجره تنظیمات برای حل وابسته به زمان ، بخش تحمل مطلق را پیدا کنید . |
4 | از لیست روش تحمل ، دستی را انتخاب کنید . |
5 | در نوار ابزار مطالعه ، |
نتایج
همانطور که در شکل 4 و شکل 5 نشان داده شده است، از دستورالعمل های زیر برای رسم سرعت زاویه ای پینیون و نیروی تماس برای جفت چرخ دنده ها استفاده کنید .
سرعت زاویه ای پینیون
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، سرعت زاویهای پینیون را در قسمت نوشتار برچسب تایپ کنید . |
3 | برای گسترش بخش عنوان کلیک کنید . از لیست نوع عنوان ، Label را انتخاب کنید . |
4 | قسمت Plot Settings را پیدا کنید . |
5 | کادر بررسی برچسب محور y را انتخاب کنید . در فیلد نوشتاری مرتبط، Angular velocity (rad/s) را تایپ کنید . |
جهانی 1
1 | روی Pinion angular velocity کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Gear pairs>Gear Pair: Rigid>Pinion>mbd.grp1.tht_pn – سرعت زاویه ای پینیون – rad/s را انتخاب کنید . |
3 | قسمت x-Axis Data را پیدا کنید . از لیست Parameter ، Expression را انتخاب کنید . |
4 | روی Replace Expression در گوشه سمت راست بالای بخش x-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint: Fixed-Gear 1>mbd.hgj1.th – Relative rotation – rad را انتخاب کنید . |
5 | قسمت x-Axis Data را پیدا کنید . از لیست واحد ، ° را انتخاب کنید . |
6 | چک باکس Description را انتخاب کنید . در قسمت متن مرتبط، چرخش چرخ دنده را تایپ کنید . |
7 | برای گسترش بخش Coloring and Style کلیک کنید . از لیست Width ، 2 را انتخاب کنید . |
8 | برای گسترش بخش Legends کلیک کنید . از فهرست Legends ، Manual را انتخاب کنید . |
9 | در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
سفت و سخت |
جهانی 2
1 | روی Global 1 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش داده را پیدا کنید . |
3 | از لیست Dataset ، None را انتخاب کنید . |
4 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.grp2.tht_pn | راد/ثانیه | سرعت زاویه ای پینیون |
5 | قسمت Data را پیدا کنید . از فهرست مجموعه داده ، مطالعه 2: گذرا ( سفتی ثابت)/راه حل 2 (sol2) را انتخاب کنید . |
6 | قسمت Legends را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
سفتی ثابت |
جهانی 3
1 | روی Global 2 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش داده را پیدا کنید . |
3 | از لیست Dataset ، None را انتخاب کنید . |
4 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.grp3.tht_pn | راد/ثانیه | سرعت زاویه ای پینیون |
5 | قسمت Data را پیدا کنید . از فهرست مجموعه داده ، مطالعه 3: گذرا ( سفتی متغیر)/راه حل 3 (sol3) را انتخاب کنید . |
6 | قسمت Legends را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
سفتی متغیر |
جهانی 4
1 | روی Global 3 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش داده را پیدا کنید . |
3 | از لیست Dataset ، None را انتخاب کنید . |
4 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.grp4.tht_pn | راد/ثانیه | سرعت زاویه ای پینیون |
5 | قسمت Data را پیدا کنید . از لیست مجموعه داده ، مطالعه 4: گذرا ( خطای انتقال)/راه حل 4 (sol4) را انتخاب کنید . |
6 | قسمت Legends را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
خطای انتقال |
سرعت زاویه ای پینیون
1 | در پنجره Model Builder ، روی Pinion angular velocity کلیک کنید . |
2 | در نوار ابزار سرعت زاویهای Pinion ، روی |
3 |
نیروی تماس
1 | روی Pinion angular velocity کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، نیروی تماس را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Plot Settings را پیدا کنید . در قسمت متن برچسب محور y ، Force (N) را تایپ کنید . |
4 | قسمت Legend را پیدا کنید . از لیست موقعیت ، پایین سمت راست را انتخاب کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره نیروی تماس را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.grp1.Fc | ن | نیرو در نقطه تماس |
جهانی 2
1 | در پنجره Model Builder ، روی Global 2 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.grp2.Fc | ن | نیرو در نقطه تماس |
جهانی 3
1 | در پنجره Model Builder ، روی Global 3 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.grp3.Fc | ن | نیرو در نقطه تماس |
جهانی 4
1 | در پنجره Model Builder ، روی Global 4 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.grp4.Fc | ن | نیرو در نقطه تماس |
4 | در نوار ابزار نیروی تماس ، روی |
5 |
از دستورالعمل های زیر برای ترسیم نیروهای واکنش و گشتاورها در مرکز چرخ زمانی که جفت دنده دارای سفتی متغیر است، همانطور که به ترتیب در شکل 6 و شکل 7 نشان داده شده است، استفاده کنید .
نیروهای واکنش (سفتی متغیر)
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، نیروهای واکنش (سختی متفاوت) را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Data را پیدا کنید . از فهرست مجموعه داده ، مطالعه 3: گذرا ( سفتی متغیر)/راه حل 3 (sol3) را انتخاب کنید . |
4 | قسمت عنوان را پیدا کنید . از لیست نوع عنوان ، Label را انتخاب کنید . |
5 | قسمت Plot Settings را پیدا کنید . |
6 | کادر بررسی برچسب محور y را انتخاب کنید . در قسمت متن مرتبط، Force (N) را تایپ کنید . |
جهانی 1
1 | روی Reaction force (Varying stiffness) کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Gear pairs>Gear Pair: Varying Stiffness>Wheel>Force at the center wheel – N>mbd.grp3.F_whx – Force at مرکز چرخ ، x جزء را انتخاب کنید . |
3 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.grp3.F_whx | ن | نیرو در مرکز چرخ، جزء x |
mbd.grp3.F_why | ن | نیرو در مرکز چرخ، جزء y |
mbd.grp3.F_whz | ن | نیرو در مرکز چرخ، جزء z |
4 | قسمت x-Axis Data را پیدا کنید . از لیست Parameter ، Expression را انتخاب کنید . |
5 | در قسمت متن Expression ، mbd.hgj1.th را تایپ کنید . |
6 | از لیست واحد ، ° را انتخاب کنید . |
7 | چک باکس Description را انتخاب کنید . در قسمت متن مرتبط، چرخش چرخ دنده را تایپ کنید . |
8 | قسمت Coloring and Style را پیدا کنید . از لیست Width ، 2 را انتخاب کنید . |
9 | در نوار ابزار نیروهای واکنش (سختی متفاوت) ، روی |
نیروهای واکنش (سفتی متغیر)
1 | در پنجره Model Builder ، روی Reaction force (Varying stiffness) کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، بخش Axis را پیدا کنید . |
3 | تیک گزینه Manual axis limits را انتخاب کنید . |
4 | در قسمت حداقل متن x ، 0 را تایپ کنید . |
5 | در قسمت حداکثر متن x ، 55 را تایپ کنید . |
6 | در قسمت حداقل y متن، -200 را تایپ کنید . |
7 | در قسمت متن حداکثر y ، 500 را تایپ کنید . |
8 | در نوار ابزار نیروهای واکنش (سختی متفاوت) ، روی |
لحظات واکنش (سفتی متغیر)
1 | روی Reaction force (Varying stiffness) کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Reaction moments (Varying stiffness) را در قسمت نوشتار Label تایپ کنید. |
3 | قسمت Plot Settings را پیدا کنید . در قسمت نوشتاری برچسب محور y ، Moment (N*m) را تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Reaction moments (Varying stiffness) را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.grp3.M_whx | N*m | لحظه در مرکز چرخ، جزء x |
mbd.grp3.M_why | N*m | لحظه در مرکز چرخ، جزء y |
mbd.grp3.M_whz | N*m | لحظه در مرکز چرخ، جزء z |
لحظات واکنش (سفتی متغیر)
1 | در پنجره Model Builder ، روی Reaction moments (Varying stiffness) کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، بخش Axis را پیدا کنید . |
3 | در فیلد متن حداقل y ، -18 را تایپ کنید . |
4 | در قسمت حداکثر متن y ، 17 را تایپ کنید . |
5 | در نوار ابزار Reaction moments (Varying stiffness) روی |
اضافه کردن مطالعه
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Study بروید . |
3 | زیربخش مطالعات را پیدا کنید . در درخت انتخاب مطالعه ، General Studies>Eigenfrequency را انتخاب کنید . |
4 | روی Add Study در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
یک مطالعه فرکانس ویژه اضافه کنید و راه حل را برای یک جفت دنده صلب محاسبه کنید.
مطالعه 5: خود فرکانس (سخت)
1 | در پنجره Model Builder ، روی Study 5 کلیک کنید . |
2 | در پنجره تنظیمات برای مطالعه ، Study 5: Eigenfrequency (Rigid) را در قسمت نوشتار Label تایپ کنید . |
مرحله 1: فرکانس ویژه
1 | در پنجره Model Builder ، در مطالعه 5: Eigenfrequency (Rigid) روی مرحله 1: Eigenfrequency کلیک کنید . |
2 | در پنجره تنظیمات برای Eigenfrequency ، قسمت Study Settings را پیدا کنید . |
3 | کادر بررسی تعداد دلخواه فرکانس ویژه را انتخاب کنید . در فیلد متن مرتبط، 5 را تایپ کنید . |
4 | قسمت Physics and Variables Selection را پیدا کنید . تیک Modify model configuration for study step را انتخاب کنید . |
5 | در درخت، Component 1 (comp1)>Multibody Dynamics (mbd)>Hinge Joint: Fixed-Gear 1>Prescribed Motion 1 , Component 1 (comp1)>Multibody Dynamics (mbd)>Linge Joint: Fixed-Gear 2 , Component را انتخاب کنید. 1 (comp1)> دینامیک چند بدنه (mbd)> جفت دنده: سفتی ثابت ، جزء 1 (comp1)> دینامیک چند بدنه (mbd)> جفت دنده: سفتی متغیر و مولفه 1 (comp1)> Multibody Dynamics (mbd)> Gear Pair: خطای انتقال . |
6 |
7 | در نوار ابزار صفحه اصلی ، |
نتایج
شکل حالت (mbd)
1 | در پنجره Settings for 3D Plot Group ، بخش Data را پیدا کنید . |
2 | از لیست فرکانس ویژه (Hz) ، 24269 را انتخاب کنید . |
یک مطالعه فرکانس ویژه دیگر اضافه کنید و جواب را برای یک جفت دنده با سفتی ثابت محاسبه کنید.
اضافه کردن مطالعه
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Study بروید . |
3 | زیربخش مطالعات را پیدا کنید . در درخت انتخاب مطالعه ، General Studies>Eigenfrequency را انتخاب کنید . |
4 | روی Add Study در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
مطالعه 6: فرکانس ویژه (سفتی ثابت)
1 | در پنجره Model Builder ، روی Study 6 کلیک کنید . |
2 | در پنجره تنظیمات برای مطالعه ، Study 6: Eigenfrequency (Stiffness Constant) را در قسمت نوشتار Label تایپ کنید . |
مرحله 1: فرکانس ویژه
1 | در پنجره Model Builder ، در مطالعه 6: Eigenfrequency ( Stiffness Constant) روی مرحله 1: Eigenfrequency کلیک کنید . |
2 | در پنجره تنظیمات برای Eigenfrequency ، بخش Physics and Variables Selection را پیدا کنید . |
3 | تیک Modify model configuration for study step را انتخاب کنید . |
4 | در درخت، Component 1 (comp1)>Multibody Dynamics (mbd)>Hinge Joint: Fixed-Gear 1>Prescribed Motion 1 , Component 1 (comp1)>Multibody Dynamics (mbd)>Linge Joint: Fixed-Gear 2 , Component را انتخاب کنید. 1 (comp1)> Multibody Dynamics (mbd)> Gear Pair: Rigid , Component 1 (comp1)> Multibody Dynamics (mbd)> Gear Pair: Varying سفتی و جزء 1 (comp1)>Multibody Dynamics (mbd)> جفت دنده: خطای انتقال . |
5 |
6 | در نوار ابزار صفحه اصلی ، |
نتایج
شکل حالت (mbd) 1
1 | در پنجره Settings for 3D Plot Group ، بخش Data را پیدا کنید . |
2 | از لیست فرکانس ویژه (Hz) 288.61+588.2i را انتخاب کنید . |
3 | در نوار ابزار Mode Shape (mbd) 1 ، روی |
4 |
5 | از لیست فرکانس ویژه (Hz) 26796+144.67i را انتخاب کنید . |
6 | در نوار ابزار Mode Shape (mbd) 1 ، روی |
7 |
انیمیشن 1
در نوار ابزار نتایج ، روی انیمیشن کلیک کنید و Player را انتخاب کنید .



