
جرثقیل سواری کامیون
معرفی
بسیاری از کامیون ها برای جابجایی بار مجهز به جرثقیل هستند. چنین جرثقیل هایی دارای تعدادی سیلندر هیدرولیکی هستند که حرکت را کنترل می کنند و مکانیسم های مختلفی دارند.
در این مثال، تجزیه و تحلیل بدنه صلب چنین جرثقیلی به منظور یافتن نیروهای سیلندر و نیروهای محور در طول یک چرخه عملیاتی انجام شده است.
تعریف مدل
هندسه جرثقیل، که از مدل CAD وارد شده است، در شکل 1 و شکل 2 نشان داده شده است . در کل از 14 قسمت تشکیل شده است که می توانند نسبت به یکدیگر حرکت کنند.
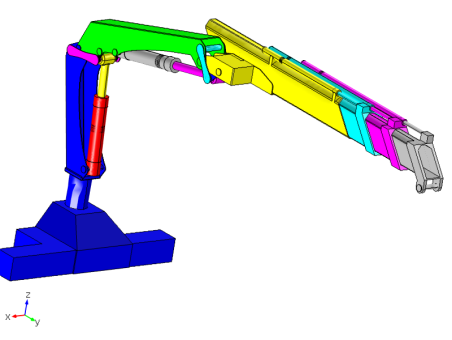
شکل 1: هندسه جرثقیل.
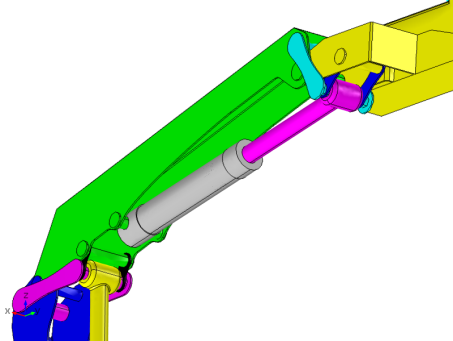
شکل 2: نمای نزدیک مکانیسم های پیوند.
قسمت | نام در مدل | رنگ در شکل |
پایه | پایه | آبی |
بوم درونی | بوم 1 | سبز |
بوم بیرونی | بوم2 | رنگ زرد |
پسوندهای تلسکوپی | پسوند1، پسوند2، پسوند3 | فیروزه ای، سرخابی، خاکستری |
سیلندرهای بالابر بوم | سیلندر1، سیلندر2 | قرمز، خاکستری |
پیستون بالابر بوم | پیستون 1، پیستون 2 | زرد، سرخابی |
مکانیسم پیوند داخلی | لینک 1، لینک 2 | سرخابی، مشکی |
مکانیسم پیوند بیرونی | لینک 3، لینک 4 | فیروزه ای، آبی |
بارها
• | وزن خود در جهت Z منفی |
• | محموله 1000 کیلوگرمی در نوک جرثقیل |
چرخه عملیاتی
چرخه کار شبیه سازی شده شامل بلند کردن بار از یک موقعیت دور و زیر جرثقیل است. جرثقیل ابتدا بار را به سمت بالا و سپس به سمت داخل به موقعیت نزدیک به جرثقیل منتقل می کند. مسیر نوک جرثقیل در طول چرخه عملیاتی در شکل 3 نشان داده شده است .
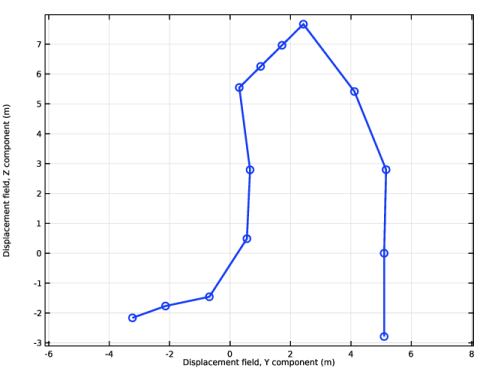
شکل 3: مسیر نوک جرثقیل در طول چرخه عملیاتی.
در زندگی واقعی، جرثقیل با کنترل سه طول سیلندر کار می کند:
• | سیلندر داخلی که بوم داخلی را بالا می برد. |
• | سیلندر بیرونی که زاویه بین بوم داخلی و بوم بیرونی را کنترل می کند. |
• | سیلندرهای اکستنشن، که میزان دور بودن اکستنشن ها را کنترل می کنند. این سه سیلندر به گونه ای هماهنگ شده اند که همه آنها پسوند یکسانی داشته باشند. |
برای تجویز یک چرخه عملیاتی، استفاده از زوایای بوم ها به عنوان پارامتر به جای طول سیلندر راحت تر است. پارامترهای انتخاب شده برای تعریف چرخه عملیاتی در جدول 2 آورده شده است .
موقعیت | زاویه بوم داخلی به افقی (درجه) | زاویه بین بوم داخلی و خارجی (درجه) | کل پسوند (متر) |
1 | -15 | 0 | 5.5 |
2 | 0 | 0 | 5.1 |
3 | 15 | 0 | 5.5 |
4 | 30 | 0 | 5.5 |
5 | 45 | 0 | 5.5 |
6 | 45 | 0 | 4.5 |
7 | 45 | 0 | 3.5 |
8 | 45 | 0 | 2.5 |
9 | 45 | -30 | 1.5 |
10 | 45 | -60 | 1.5 |
11 | 45 | -90 | 1.5 |
12 | 60 | -120 | 1.5 |
13 | 60 | -135 | 1.5 |
نتایج و بحث
جرثقیل در موقعیت نهم چرخه عملیاتی در شکل 4 نشان داده شده است .
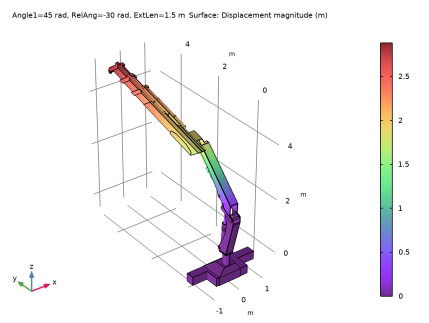
شکل 4: موقعیت جرثقیل 9.
نیروهای موجود در سیلندرهای کنترل کننده بوم در شکل 5 نشان داده شده است . نیروهای فشاری مثبت هستند. همانطور که می توان پیش بینی کرد، نیروهای سیلندر زمانی که محموله از پایه جرثقیل دور است زیاد است و باعث ایجاد گشتاورهای زیادی در اطراف لولاها می شود.
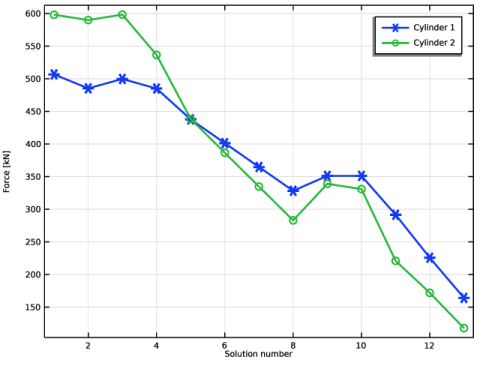
شکل 5: تغییر نیروها در سیلندرهای بالابر بوم در طول سیکل عملیاتی.
نیروهای موجود در سیلندرهای گسترش در شکل 6 نشان داده شده است ، با نیروی فشاری مثبت تعریف شده است. هنگامی که بوم بیرونی افقی است (موقعیت 2)، هیچ نیروی محوری برای حفظ موقعیت مورد نیاز نیست. نیرو در سیلندرهای داخلی بیشتر است، زیرا آنها همچنین باید وزن بخشهای کششی را به بیرون حمل کنند.
نیروهای وارد بر محور لولا که بوم های داخلی و خارجی را به هم متصل می کند در شکل 7 نشان داده شده است . به روشی مشابه می توانید نیروهای وارد شده در اتصالات بین هر قسمت را برای جرثقیل ترسیم کنید. این نتایج اطلاعات ضروری را برای طراحی ساختاری چنین جزئیاتی فراهم می کند.
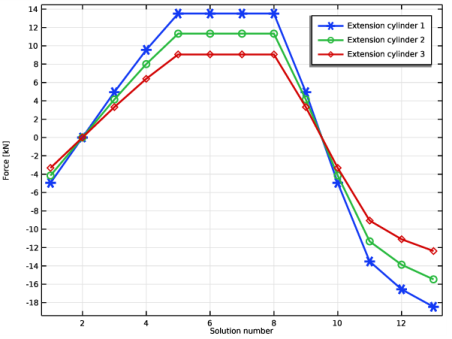
شکل 6: تغییر نیروها در سیلندرهای کششی در طول سیکل عملیاتی.
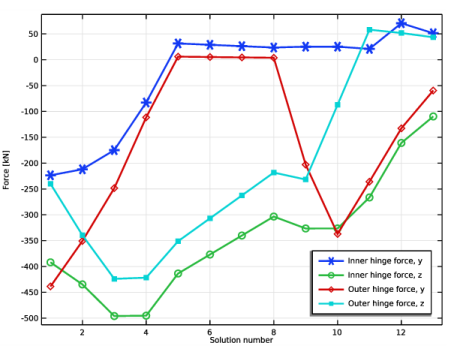
شکل 7: نیروهای وارد بر لولاهای بین قطعات اصلی جرثقیل.
نکاتی درباره پیاده سازی COMSOL
تجزیه و تحلیل شامل مجموعه ای از راه حل های ثابت است که توسط یک جارو بر روی 13 ترکیب پارامتر کنترل می شود. پارامترهای مورد استفاده زوایای بوم و جابجایی کل سیلندرهای گسترش است.
برای سیلندرهای بوم، پسوند سیلندرها است که می توانید به عنوان ورودی وارد کنید. پارامترهای شناخته شده زوایای بوم هستند. در این مدل، معادلات جهانی اضافی را اضافه می کنید که در آن پسوند سیلندر بر اساس زوایای بوم مورد نیاز محاسبه می شود.
در مدلی مانند این که قطعات زیادی به یکدیگر متصل هستند، باید در انتخاب انواع اتصال دقت زیادی کرد تا مشکل بیش از حد محدود نشود. به عنوان مثال، اگر فقط اتصالات لولا برای یکی از مکانیسم های پیوند انتخاب شود، آنگاه انتقال به خارج از صفحه جرثقیل در حلقه بسته تجویز می شود. بررسی جدول خلاصه DOF Rigid Body اطلاعات مفیدی ارائه می دهد که به جلوگیری از چنین مشکلاتی کمک می کند. امکان دیگر اضافه کردن انعطاف پذیری در مفاصل در جهت های بیش از حد محدود است. این مشکل محدودیت بیش از حد را برطرف می کند.
مسیر کتابخانه برنامه: Multibody_Dynamics_Module/Machinery_and_Robotics/truck_mounted_crane
دستورالعمل مدلسازی
از منوی File ، New را انتخاب کنید .
جدید
در پنجره جدید ، روی  Model Wizard کلیک کنید .
Model Wizard کلیک کنید .
مدل جادوگر
1 | در پنجره Model Wizard ، روی |
2 | در درخت Select Physics ، Structural Mechanics>Multibody Dynamics (mbd) را انتخاب کنید . |
3 | روی افزودن کلیک کنید . |
4 |
5 | در درخت انتخاب مطالعه ، General Studies>Stationary را انتخاب کنید . |
6 |
هندسه 1
واردات 1 (imp1)
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای واردات ، بخش واردات را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل truck_mounted_crane.mphbin دوبار کلیک کنید . |
5 |
فرم اتحادیه (فین)
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Form Union (fin) کلیک کنید . |
2 | در پنجره تنظیمات Form Union/Assembly ، بخش Form Union/Assembly را پیدا کنید . |
3 | از لیست Action ، Form an assembly را انتخاب کنید . |
4 | تیک Create Pairs را پاک کنید . |
5 | در نوار ابزار Home ، روی |
مواد را اضافه کنید
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Material بروید . |
3 | در درخت، Built-in>Structural steel را انتخاب کنید . |
4 | روی Add to Component در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
MULTIBODY DYNAMICS (MBD)
پایه
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Multibody Dynamics (mbd) راست کلیک کرده و Material Models>Rigid Material را انتخاب کنید . |
2 | در پنجره تنظیمات برای مواد سفت و سخت ، Base را در قسمت متن برچسب تایپ کنید . |
3 | فقط دامنه های 1، 10، 17، 22 و 23 را انتخاب کنید. |
داده ها برای مواد سفت و سخت
1 | همان عملیات را سیزده بار تکرار کنید و داده های زیر را وارد کنید: |
برچسب | انتخاب دامنه |
بوم 1 | 19-21 |
بوم2 | 2، 4، 13 |
پسوند 1 | 5، 11، 14 |
پسوند 2 | 6، 8، 12 |
پسوند 3 | 3، 7، 9 |
سیلندر 1 | 29 |
پیستون 1 | 27 |
سیلندر 2 | 30 |
پیستون 2 | 28 |
پیوند 1 | 15 |
لینک 2 | 18، 25، 32 |
لینک 3 | 16 |
لینک 4 | 24، 26، 31 |
پایه ثابت نگه داشته می شود.
2 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Base کلیک کنید . |
محدودیت ثابت 1
در نوار ابزار Physics ، روی Attributes کلیک کنید و Fixed Constraint را انتخاب کنید .
حالا اتصالات بین قسمت های مختلف جرثقیل را مشخص کنید.
پایه لولا-بوم1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات مربوط به مفصل لولایی ، در قسمت متن برچسب ، Hinge Base-Boom1 را تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از لیست منبع ، پایه را انتخاب کنید . |
4 | از لیست مقصد ، Boom1 را انتخاب کنید . |
5 | قسمت نیروهای مشترک و لحظات را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Hinge Base-Boom1 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | فقط مرزهای 404 و 413 را انتخاب کنید. |
پایه لولا-سیلندر1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، در قسمت متن برچسب ، Hinge Base-Cylinder1 را تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از لیست منبع ، پایه را انتخاب کنید . |
4 | از لیست مقصد ، Cylinder1 را انتخاب کنید . |
5 | قسمت نیروهای مشترک و لحظات را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Hinge Base-Cylinder1 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | فقط مرزهای 589 و 598 را انتخاب کنید. |
پایه لولا-لینک1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، Hinge Base-Link1 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از لیست منبع ، پایه را انتخاب کنید . |
4 | از لیست مقصد ، Link1 را انتخاب کنید . |
5 | قسمت نیروهای مشترک و لحظات را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Hinge Base-Link1 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | فقط مرزهای 365 و 366 را انتخاب کنید. |
لولا بوم1-لینک2
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، در قسمت متن برچسب ، Hinge Boom1-Link2 را تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از فهرست منبع ، Boom1 را انتخاب کنید . |
4 | از لیست مقصد ، Link2 را انتخاب کنید . |
5 | قسمت نیروهای مشترک و لحظات را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Hinge Boom1-Link2 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | فقط مرزهای 414 و 423 را انتخاب کنید. |
اسلات Link1-Link2
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات Slot Joint ، Slot Link1-Link2 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از فهرست منبع ، Link1 را انتخاب کنید . |
4 | از لیست مقصد ، Link2 را انتخاب کنید . |
5 | قسمت نیروهای مشترک و لحظات را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Slot Link1-Link2 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | فقط مرزهای 362 و 363 را انتخاب کنید. |
اسلات Link1-Piston1
1 | در پنجره Model Builder ، روی Slot Link1-Link2 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات Slot Joint ، Slot Link1-Piston1 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از لیست مقصد ، Piston1 را انتخاب کنید . |
سیلندر منشوری 1-پیستون 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای اتصال منشوری ، Prismatic Cylinder1-Piston1 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از فهرست منبع ، Cylinder1 را انتخاب کنید . |
4 | از لیست مقصد ، Piston1 را انتخاب کنید . |
5 | قسمت Axis of Joint را پیدا کنید . از لیست، انتخاب یک لبه موازی را انتخاب کنید . |
6 | تیک Reverse direction را انتخاب کنید . |
7 | قسمت نیروهای مشترک و لحظات را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Prismatic Cylinder1-Piston1 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | فقط Boundary 710 را انتخاب کنید. |
محور مشترک 1
1 | در پنجره Model Builder ، روی Joint Axis 1 کلیک کنید . |
2 | فقط Edge 1564 را انتخاب کنید. |
پایه لولا-بوم1، پایه لولا-سیلندر1، پایه لولا-لینک1، بوم لولا1-پیستون2، سیلندر منشوری 1-پیستون1، شیار پیوند1-پیستون2، شیار پیوند1-پیستون1
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) ، Ctrl-کلیک کنید تا لولا Base-Boom1 , Hinge Base-Cylinder1 , Hinge Base-Link1 , Hinge Boom1-Link2 , Slot Link1-Link2 , Slot را انتخاب کنید. Link1-Piston1 و Prismatic Cylinder1-Piston1 . |
2 | کلیک راست کرده و Duplicate را انتخاب کنید . |
لولا بوم1-بوم2
1 | در پنجره تنظیمات مربوط به مفصل لولایی ، در قسمت متن برچسب ، Hinge Boom1-Boom2 را تایپ کنید . |
2 | بخش انتخاب پیوست را پیدا کنید . از فهرست منبع ، Boom1 را انتخاب کنید . |
3 | از لیست مقصد ، Boom2 را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Hinge Boom1-Boom2 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : مرز ، قسمت انتخاب مرز را پیدا کنید . |
3 |
4 | فقط مرزهای 438 و 439 را انتخاب کنید. |
لولا بوم1-سیلندر2
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Hinge Base-Cylinder1.1 کلیک کنید . |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، در قسمت متن برچسب ، Hinge Boom1-Cylinder2 را تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از فهرست منبع ، Boom1 را انتخاب کنید . |
4 | از لیست مقصد ، Cylinder2 را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Hinge Boom1-Cylinder2 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : مرز ، قسمت انتخاب مرز را پیدا کنید . |
3 |
4 | فقط مرزهای 424 و 433 را انتخاب کنید. |
لولا بوم1-لینک3
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Hinge Base-Link1.1 کلیک کنید . |
2 | در پنجره تنظیمات مربوط به مفصل لولایی ، Hinge Boom1-Link3 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از فهرست منبع ، Boom1 را انتخاب کنید . |
4 | از لیست مقصد ، Link3 را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Hinge Boom1-Link3 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : مرز ، قسمت انتخاب مرز را پیدا کنید . |
3 |
4 | فقط مرزهای 391 و 392 را انتخاب کنید. |
لولا بوم2-لینک4
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Hinge Boom1-Link2.1 کلیک کنید . |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، Hinge Boom2-Link4 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از لیست منبع ، Boom2 را انتخاب کنید . |
4 | از لیست مقصد ، Link4 را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Hinge Boom2-Link4 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : مرز ، قسمت انتخاب مرز را پیدا کنید . |
3 |
4 | فقط مرزهای 603 و 604 را انتخاب کنید. |
اسلات Link3-Link4
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Slot Link1-Link2.1 کلیک کنید . |
2 | در پنجره تنظیمات Slot Joint ، Slot Link3-Link4 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از فهرست منبع ، Link3 را انتخاب کنید . |
4 | از لیست مقصد ، Link4 را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Slot Link3-Link4 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : مرز ، قسمت انتخاب مرز را پیدا کنید . |
3 |
4 | فقط مرزهای 388 و 389 را انتخاب کنید. |
اسلات Link3-Piston2
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Slot Link1-Piston1.1 کلیک کنید . |
2 | در پنجره تنظیمات Slot Joint ، Slot Link3-Piston2 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از فهرست منبع ، Link3 را انتخاب کنید . |
4 | از لیست مقصد ، Piston2 را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Slot Link3-Piston2 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : مرز ، قسمت انتخاب مرز را پیدا کنید . |
3 |
4 | فقط مرزهای 388 و 389 را انتخاب کنید. |
سیلندر منشوری 2-پیستون 2
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Prismatic Cylinder1-Piston1.1 کلیک کنید . |
2 | در پنجره تنظیمات برای اتصال منشوری ، Prismatic Cylinder2-Piston2 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از لیست منبع ، Cylinder2 را انتخاب کنید . |
4 | از لیست مقصد ، Piston2 را انتخاب کنید . |
5 | قسمت Axis of Joint را پیدا کنید . تیک Reverse direction را پاک کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Prismatic Cylinder2-Piston2 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : مرز ، قسمت انتخاب مرز را پیدا کنید . |
3 |
4 | فقط Boundary 746 را انتخاب کنید. |
محور مشترک 1
1 | در پنجره Model Builder ، روی Joint Axis 1 کلیک کنید . |
2 | در پنجره تنظیمات برای Joint Axis ، قسمت Edge Selection را پیدا کنید . |
3 |
4 | فقط Edge 1682 را انتخاب کنید. |
منشوری Boom2-Extension1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره Settings برای Prismatic Joint ، Prismatic Boom2-Extension1 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از لیست منبع ، Boom2 را انتخاب کنید . |
4 | از لیست مقصد ، Extension1 را انتخاب کنید . |
5 | قسمت Axis of Joint را پیدا کنید . بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
1 | y |
0 | z |
6 | قسمت نیروهای مشترک و لحظات را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Prismatic Boom2-Extension1 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | فقط مرزهای 315 و 316 را انتخاب کنید. |
منشوری Extension1-Extension2
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای اتصال Prismatic ، Prismatic Extension1-Extension2 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از فهرست منبع ، Extension1 را انتخاب کنید . |
4 | از لیست مقصد ، Extension2 را انتخاب کنید . |
5 | قسمت Axis of Joint را پیدا کنید . بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
1 | y |
0 | z |
6 | قسمت نیروهای مشترک و لحظات را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Prismatic Extension1-Extension2 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | فقط مرزهای 280 و 284 را انتخاب کنید. |
منشوری Extension2-Extension3
1 | در نوار ابزار Physics ، روی |
2 | در پنجره Settings برای Prismatic Joint ، Prismatic Extension2-Extension3 را در قسمت نوشتار Label تایپ کنید . |
3 | بخش انتخاب پیوست را پیدا کنید . از فهرست منبع ، Extension2 را انتخاب کنید . |
4 | از لیست مقصد ، Extension3 را انتخاب کنید . |
5 | قسمت Axis of Joint را پیدا کنید . بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
1 | y |
0 | z |
6 | قسمت نیروهای مشترک و لحظات را پیدا کنید . از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، گره Prismatic Extension2-Extension3 را گسترش دهید ، سپس روی Center of Joint: Boundary 1 کلیک کنید . |
2 | فقط مرزهای 223 و 224 را انتخاب کنید. |
بررسی کنید که اکنون پنج درجه آزادی باقی مانده است، یکی برای هر سیلندر.
3 | در پنجره Model Builder ، روی Multibody Dynamics (mbd) کلیک کنید . |
4 | در پنجره تنظیمات برای Multibody Dynamics ، روی قسمت Rigid Body DOF Summary کلیک کنید . |
جاذبه 1
در نوار ابزار Physics ، روی Global کلیک کنید و Gravity را انتخاب کنید .
بار بدن 1
1 | در نوار ابزار Physics ، روی |
2 | فقط دامنه 3 را انتخاب کنید. |
3 | در پنجره تنظیمات برای بار بدن ، بخش Force را پیدا کنید . |
4 | از لیست نوع بار ، نیروی کل را انتخاب کنید . |
5 | بردار F tot را به صورت مشخص کنید |
0 | ایکس |
0 | y |
-1000[kg]*g_const | z |
حال، موقعیت همه سیلندرها را تجویز کنید. عملکرد سه سیلندر فرمت هماهنگ شده است.
تعاریف جهانی
پارامترهای 1
1 | در پنجره Model Builder ، در قسمت Global Definitions روی Parameters 1 کلیک کنید . |
2 | در پنجره تنظیمات برای پارامترها ، بخش پارامترها را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
نام | اصطلاح | ارزش | شرح |
زاویه 1 | 0 [درجه] | 0 راد | زاویه به افقی، بوم داخلی |
RelAng | 0 [درجه] | 0 راد | زاویه بین بوم ها |
ExtLen | 0[m] | 0 متر | طول کل پسوند |
MULTIBODY DYNAMICS (MBD)
1 |
2 | در کادر محاورهای Show More Options ، در درخت، کادر را برای گره Physics>Equation-Based Contributions انتخاب کنید . |
3 | روی OK کلیک کنید . |
معادلات جهانی 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای معادلات جهانی ، بخش معادلات جهانی را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
نام | F(U,UT,UTT,T) (1) | مقدار اولیه (U_0) (1) | مقدار اولیه (U_T0) (1/S) | شرح |
cyl1Pos | Angle1-mbd.hgj1.th*180/pi | 0 | 0 | پسوند سیلندر داخلی |
4 | قسمت Units را پیدا کنید . |
5 | در کادر محاورهای Physical Quantity ، جابجایی را در قسمت متن تایپ کنید. |
6 |
7 | در درخت، General>Displacement (m) را انتخاب کنید . |
8 | روی OK کلیک کنید . |
9 | در پنجره تنظیمات برای معادلات جهانی ، بخش معادلات جهانی را پیدا کنید . |
10 | در جدول تنظیمات زیر را وارد کنید: |
نام | F(U,UT,UTT,T) (1) | مقدار اولیه (U_0) (M) | مقدار اولیه (U_T0) (M/S) | شرح |
cyl2Pos | RelAng-mbd.hgj5.th*180/pi | 0 | 0 | پسوند سیلندر بیرونی |
سیلندر منشوری 1-پیستون 1
در پنجره Model Builder ، روی Prismatic Cylinder1-Piston1 کلیک کنید .
حرکت تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای حرکت تجویز شده ، قسمت حرکت ترجمه تجویز شده را پیدا کنید . |
3 | در قسمت متن u p ، cyl1Pos را تایپ کنید . |
جابجایی های تعیین شده برای سیلندرهای بوم توسط معادلات جهانی ارائه شده است. آنها نباید از طریق نیروهای واکنش به سیستم معادله جفت شوند.
4 | برای باز کردن بخش Reaction Force Settings کلیک کنید . کادر بررسی اعمال واکنش فقط روی متغیرهای مشترک را انتخاب کنید . |
سیلندر منشوری 2-پیستون 2
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Prismatic Cylinder2-Piston2 کلیک کنید .
حرکت تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای حرکت تجویز شده ، قسمت حرکت ترجمه تجویز شده را پیدا کنید . |
3 | در قسمت متن u p ، cyl2Pos را تایپ کنید . |
4 | قسمت تنظیمات نیروی واکنش را پیدا کنید . کادر بررسی اعمال واکنش فقط روی متغیرهای مشترک را انتخاب کنید . |
منشوری Boom2-Extension1
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Prismatic Boom2-Extension1 کلیک کنید .
حرکت تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای حرکت تجویز شده ، قسمت حرکت ترجمه تجویز شده را پیدا کنید . |
3 | در قسمت u p text ExtLen/3 را تایپ کنید . |
منشوری Extension1-Extension2
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Prismatic Extension1-Extension2 کلیک کنید .
حرکت تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای حرکت تجویز شده ، قسمت حرکت ترجمه تجویز شده را پیدا کنید . |
3 | در قسمت u p text ExtLen/3 را تایپ کنید . |
منشوری Extension2-Extension3
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Prismatic Extension2-Extension3 کلیک کنید .
حرکت تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای حرکت تجویز شده ، قسمت حرکت ترجمه تجویز شده را پیدا کنید . |
3 | در قسمت u p text ExtLen/3 را تایپ کنید . |
از آنجایی که این یک آنالیز بدنه سفت و سخت است، تنها مورد نیاز مش این است که بتواند هندسه را حل کند. جدای از آن، برای به حداقل رساندن ذخیره سازی و محاسبات، باید تا حد امکان درشت باشد.
مش 1
چهار وجهی رایگان 1
1 | در پنجره Model Builder گره Mesh 1 را گسترش دهید . |
2 | روی Component 1 (comp1)>Mesh 1 کلیک راست کرده و Free Tetrahedral را انتخاب کنید . |
اندازه
1 | در پنجره تنظیمات برای اندازه ، قسمت اندازه عنصر را پیدا کنید . |
2 | از لیست Predefined ، Finer را انتخاب کنید . |
سایز 1
1 | در پنجره Model Builder ، گره Component 1 (comp1)>Mesh 1>Free Tetrahedral 1 را گسترش دهید . |
2 | روی Free Tetrahedral 1 کلیک راست کرده و Size را انتخاب کنید . |
3 | در پنجره تنظیمات برای اندازه ، قسمت انتخاب موجودیت هندسی را پیدا کنید . |
4 | از لیست سطح نهاد هندسی ، دامنه را انتخاب کنید . |
5 | فقط دامنه های 2-4، 10، 15-24، 31 و 32 را انتخاب کنید. |
سایز ۲
1 | در پنجره Model Builder ، روی Free Tetrahedral 1 کلیک راست کرده و Size را انتخاب کنید . |
2 | در پنجره تنظیمات برای اندازه ، قسمت اندازه عنصر را پیدا کنید . |
3 | از لیست Predefined ، Fine را انتخاب کنید . |
4 | قسمت انتخاب موجودیت هندسی را پیدا کنید . از لیست سطح نهاد هندسی ، دامنه را انتخاب کنید . |
5 | فقط دامنه های 5-7، 17-20، 23 و 24 را انتخاب کنید. |
6 | در پنجره Model Builder ، روی Mesh 1 کلیک راست کرده و Build All را انتخاب کنید . |
مطالعه 1
مرحله 1: ثابت
1 | در پنجره Model Builder ، در بخش مطالعه 1 ، روی Step 1: Stationary کلیک کنید . |
2 | در پنجره تنظیمات برای Stationary ، برای گسترش بخش Study Extensions کلیک کنید . |
3 | کادر بررسی جارو کمکی را انتخاب کنید . |
موقعیتهای چرخه عملیاتی در فایل ذخیره میشوند.
4 |
5 | به پوشه Application Libraries مدل بروید و روی فایل truck_mounted_crane_solparam.txt دوبار کلیک کنید . |
6 | از لیست Run continuation for ، بدون پارامتر را انتخاب کنید . |
راه حل 1 (sol1)
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره Model Builder ، گره Solution 1 (sol1) را گسترش دهید . |
3 | در پنجره Model Builder ، گره Study 1>Solver Configurations>Solution 1 (sol1)>Dependent Variables 1 را گسترش دهید ، سپس روی comp1.ODE1 کلیک کنید . |
4 | در پنجره تنظیمات برای حالت ، بخش مقیاس گذاری را پیدا کنید . |
5 | از لیست روش ، دستی را انتخاب کنید . |
6 | در قسمت متن مقیاس ، 0.1 را تایپ کنید . |
7 | در پنجره Model Builder ، در قسمت Study 1>Solver Configurations>Solution 1 (sol1) روی Stationary Solver 1 کلیک کنید . |
8 | در پنجره تنظیمات برای حل ثابت ، بخش عمومی را پیدا کنید . |
9 | در قسمت متنی Relative tolerance ، 1e-6 را تایپ کنید . |
مرحله 1: ثابت
1 | در پنجره Model Builder ، در بخش مطالعه 1 ، روی Step 1: Stationary کلیک کنید . |
2 | در پنجره تنظیمات برای Stationary ، کلیک کنید تا بخش Results When Solving گسترش یابد . |
3 | کادر Plot را انتخاب کنید . |
4 | در نوار ابزار مطالعه ، |
نتایج
جابجایی (mbd)
1 | در پنجره Settings for 3D Plot Group ، بخش Data را پیدا کنید . |
2 | از لیست مقدار پارامتر (Angle1 (rad)، RelAng (rad)، ExtLen (m)) 9 را انتخاب کنید: Angle1=45 rad، RelAng=-30 rad، ExtLen=1.5 m . |
3 | در نوار ابزار Displacement (mbd) ، روی |
4 |
نیروهای سیلندر بوم
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Boom Cylinder Forces را در قسمت متن برچسب تایپ کنید . |
جهانی 1
1 | روی Boom Cylinder Forces کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.prj1.Fl1 | kN | سیلندر 1 |
mbd.prj2.Fl1 | kN | سیلندر 2 |
4 | برای گسترش بخش Coloring and Style کلیک کنید . از لیست Width ، 2 را انتخاب کنید . |
5 | زیربخش نشانگرهای خط را پیدا کنید . از لیست نشانگر ، چرخه را انتخاب کنید . |
نیروهای سیلندر بوم
1 | در پنجره Model Builder ، روی Boom Cylinder Forces کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | کادر بررسی برچسب محور y را انتخاب کنید . در فیلد متن مرتبط، Force [kN] را تایپ کنید . |
4 | برای گسترش بخش عنوان کلیک کنید . از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
5 | در نوار ابزار Boom Cylinder Forces ، روی |
نیروهای سیلندر اکستنشن
1 | روی Boom Cylinder Forces کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Extension Cylinder Forces را در قسمت متن برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Boom Cylinder Forces 1 را گسترش دهید ، سپس روی Results>Extension Cylinder Forces>Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.prj3.Fl1 | kN | سیلندر پسوند 1 |
mbd.prj4.Fl1 | kN | سیلندر فرمت 2 |
mbd.prj5.Fl1 | kN | سیلندر اکستنشن 3 |
4 | در نوار ابزار Extension Cylinder Forces ، روی |
نیروهای لولا
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات مربوط به گروه طرح 1 بعدی ، در قسمت نوشتار برچسب ، فشارهای Hinge را تایپ کنید . |
جهانی 1
1 | روی Hinge Forces کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.hgj1.Fy | kN | نیروی لولا داخلی، y |
mbd.hgj1.Fz | kN | نیروی لولا داخلی، z |
mbd.hgj5.Fy | kN | نیروی لولای بیرونی، y |
mbd.hgj5.Fz | kN | نیروی لولا خارجی، z |
4 | قسمت Coloring and Style را پیدا کنید . از لیست Width ، 2 را انتخاب کنید . |
5 | زیربخش نشانگرهای خط را پیدا کنید . از لیست نشانگر ، چرخه را انتخاب کنید . |
نیروهای لولا
1 | در پنجره Model Builder ، روی Hinge Forces کلیک کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، قسمت Legend را پیدا کنید . |
3 | از لیست موقعیت ، پایین سمت راست را انتخاب کنید . |
4 | قسمت Plot Settings را پیدا کنید . |
5 | کادر بررسی برچسب محور y را انتخاب کنید . در فیلد متن مرتبط، Force [kN] را تایپ کنید . |
6 | قسمت عنوان را پیدا کنید . از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
7 | در نوار ابزار Hinge Forces ، روی |
مسیر نوک جرثقیل
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، مسیر حرکت نوک جرثقیل را در قسمت نوشتار برچسب تایپ کنید . |
نمودار نقطه 1
1 | روی Crane Tip Trajectory کلیک راست کرده و Point Graph را انتخاب کنید . |
2 | فقط نقطه 350 را انتخاب کنید. |
3 | در پنجره تنظیمات نمودار نقطهای ، بخش y-Axis Data را پیدا کنید . |
4 | در قسمت Expression text، w را تایپ کنید . |
5 | قسمت x-Axis Data را پیدا کنید . از لیست Parameter ، Expression را انتخاب کنید . |
6 | در قسمت Expression text، v را تایپ کنید . |
7 | برای گسترش بخش Coloring and Style کلیک کنید . از لیست Width ، 2 را انتخاب کنید . |
8 | زیربخش نشانگرهای خط را پیدا کنید . از لیست نشانگر ، دایره را انتخاب کنید . |
مسیر نوک جرثقیل
1 | در پنجره Model Builder ، روی Crane Tip Trajectory کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Title را پیدا کنید . |
3 | از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
4 | قسمت Axis را پیدا کنید . تیک گزینه Reserve aspect ratio را انتخاب کنید . |
5 | در نوار ابزار Crane Tip Trajectory ، روی |



