
بهینه سازی مکانیزم پیوند جرثقیل
معرفی
در سیستم های مکانیکی پیچیده، یافتن راه حل بهینه (یا حتی به اندازه کافی خوب) تنها از طریق بینش مهندسی یا روش های آزمون و خطا می تواند چالش برانگیز باشد. استفاده از روش های بهینه سازی ریاضی می تواند مسیری کارآمد برای طراحی بهتر باشد.
در این مثال، مکانیزم پیوند در یک جرثقیل مدلسازی شده در ماژول Multibody Dynamics با استفاده از ماژول بهینهسازی بهینه شده است. هدف کاهش نیروی سیلندر مورد نیاز برای حمل محموله خاصی در بدترین حالت چرخه عملیاتی است.
این مثال ادامه مدل Truck Mounted Crane است .
توجه: این مدل به ماژول Multibody Dynamics و Module Optimization نیاز دارد.
تعریف مدل
هندسه کامل جرثقیل در شکل 1 نشان داده شده است .
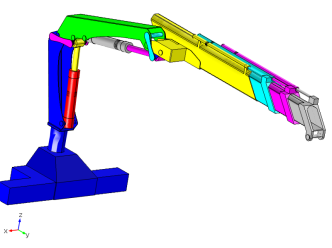
شکل 1: هندسه جرثقیل
نمای نزدیک از مکانیسم پیوند مورد استفاده برای کنترل بوم داخلی در شکل 2 نشان داده شده است . برای اطلاعات بیشتر در مورد مدل جرثقیل به توضیحات مدل جرثقیل سواری کامیون مراجعه کنید .
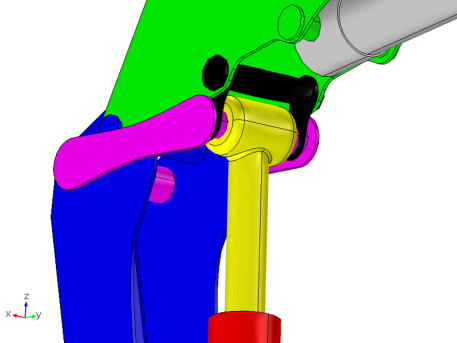
شکل 2: نمای نزدیک مکانیسم های پیوند
یک کلید برای رنگ آمیزی قطعات تشکیل دهنده مکانیسم پیوند در جدول 1 آورده شده است .
قسمت | نام در مدل | رنگ در شکل |
پایه | پایه | آبی |
بوم درونی | بوم 1 | سبز |
سیلندر بالابر بوم | سیلندر 1 | قرمز |
پیستون بالابر بوم | پیستون 1 | رنگ زرد |
مکانیسم پیوند | لینک 1، لینک 2 | سرخابی، مشکی |
چرخه عملیاتی
چرخه عملیاتی به گونه ای انتخاب می شود که ممان حمل شده توسط مکانیسم پیوند تا حد امکان بزرگ باشد.
• | بوم داخلی از پایین ترین موقعیت خود، 45 درجه شیب رو به پایین، به بالاترین موقعیت خود (عمودی) در مراحل 15 درجه افزایش می یابد . |
• | پسوندهای تلسکوپی تا حد امکان در همه موقعیت ها دورتر هستند. |
• | زاویه بوم بیرونی به گونه ای انتخاب می شود که نوک جرثقیل (و در نتیجه محموله) تا حد امکان خارج شود. |
بارها
• | وزن خود در جهت Z منفی. |
• | محموله 1000 کیلوگرمی در نوک جرثقیل. |
مشکل بهینه سازی
موقعیت سه محور را می توان تغییر داد، همانطور که در شکل 3 نشان داده شده است :
• | محور اتصال بازوی پیوند اول به پایه. |
• | محور اتصال بازوی پیوند دوم به بوم. |
• | محور اتصال دو بازوی پیوند و پیستون سیلندر هیدرولیک. |
همچنین لازم است اطمینان حاصل شود که دو محور دوم بیش از 10 میلی متر به یکدیگر نزدیکتر از پیکربندی اصلی آنها حرکت نمی کنند تا از تداخل مکانیکی جلوگیری شود.
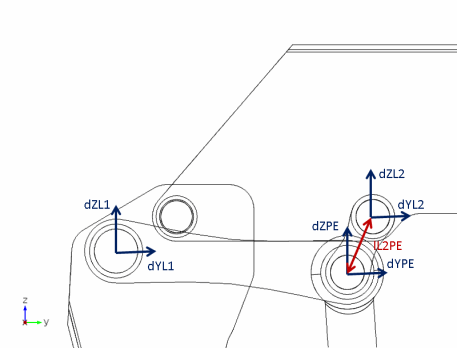
شکل 3: متغیرهای بهینه سازی (آبی) و محدودیت (قرمز).
محدودیت های جابجایی در موقعیت های محور در جدول 2 آورده شده است .
محور | افقی [MM] | عمودی [MM] |
Base-Link1 | dYL1 = [-100، +50] | dZL1 = [-150 – 30+] |
Boom1-Link1 | dYL2 = [-50، +50] | dZL2= [-50، +100] |
لینک1-لینک2-پیستون1 | dYPE = [-50، +120] | dZPE = [-100، +20] |
نتایج و بحث
نیروی موجود در سیلندرهای کنترل کننده بوم در شکل 4 نشان داده شده است . با طراحی جدید، امکان کاهش 31 درصدی نیرو از 597 کیلونیوتن به 413 کیلو نیوتن وجود دارد. این یک پیشرفت اساسی است و بسته به هدف واقعی تجزیه و تحلیل می توان از آن به دو طریق استفاده کرد:
• | بار مجاز را می توان افزایش داد. از آنجایی که بخش قابل توجهی از ظرفیت جرثقیل برای تحمل وزن خود استفاده می شود، افزایش بار بیش از 31٪ است. |
• | برای بار ثابت، نیروهای کاهش یافته در مکانیک پیوند دستیابی به معیارهای تنش و خستگی را برای مکانیسم پیوند آسانتر میکند. |
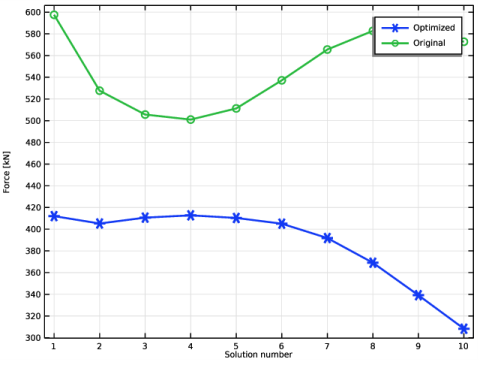
شکل 4: تغییر نیروی سیلندر در طول چرخه بار.
به عنوان نمونه ای از تأثیر بهینه سازی بر روی سایر قسمت ها، نیروهای وارد بر محور که لولای بین پایه و بوم را تشکیل می دهد در شکل 5 نشان داده شده است .
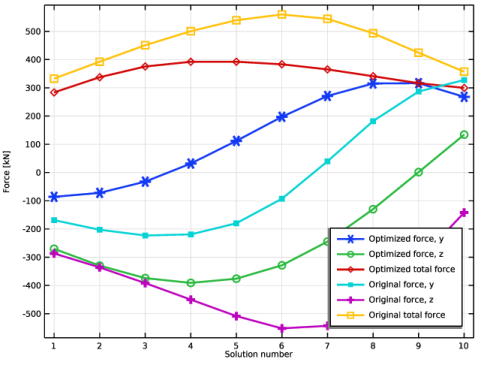
شکل 5: نیروهای وارد بر محور بین پایه و بوم.
مقادیر واقعی متغیرهای کنترل در حالت بهینه ممکن است زمانی که این مدل در رایانه های مختلف حل می شود یکسان نباشد. دلیل آن این است که حداقل نیروی سیلندر را می توان به روش های مختلف به دست آورد. راه حل های متعددی وجود دارد که (در یک تلورانس کوچک) مقادیر بهینه یکسانی را ارائه می دهند.
نکاتی درباره پیاده سازی COMSOL
از آنجایی که تمام قطعات جرثقیل بدنه سفت و سختی هستند، نیازی به جابجایی یا تغییر شکل پیوندها در طول بهینه سازی نیست. کافی است مراکز اتصالاتی که به صورت ریاضی محورها را نشان می دهند تغییر دهید. با این حال، این منجر به یک نمایش گرافیکی غیر شهودی می شود، زیرا پیوندها دیگر حول محورها در هندسه نمی چرخند.
سیلندر و پیستون در مدل به صورت فیزیکی می چرخند، زیرا جهت نیروی سیلندر باید صحیح باشد. از نظر بصری، پیستون ممکن است به نظر برسد که گویی از سیلندر بیرون کشیده شده است. این نیز یک مصنوع گرافیکی است، زیرا اگر هندسه اصلاح شده برای طراحی نهایی انتخاب شود، استوانه دیگری انتخاب می شود.
در بهینه سازی از روش BOBYQA استفاده شده است. یک روش بدون گرادیان مناسب است، زیرا امکان محاسبه مشتقات حداکثر نیروهای سیلندر با توجه به پارامترهای بهینه سازی وجود ندارد.
مسیر کتابخانه برنامه: Multibody_Dynamics_Module/Machinery_and_Robotics/crane_link_optimization
دستورالعمل مدلسازی
کتابخانه های کاربردی
1 | از منوی File ، Application Libraries را انتخاب کنید . |
2 | در پنجره Application Libraries ، Multibody Dynamics Module>Machinery and Robotics> truck_mounted_crane را در درخت انتخاب کنید . |
3 |
ریشه
پارامترهای مورد نیاز برای پارامترسازی لینک را اضافه کنید.
تعاریف جهانی
پارامترهای 1
1 | در پنجره Model Builder ، در قسمت Global Definitions روی Parameters 1 کلیک کنید . |
2 | در پنجره تنظیمات برای پارامترها ، بخش پارامترها را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل crane_link_optimization_parameters.txt دوبار کلیک کنید . |
جزء 1 (COMP1)
سیلندر و پیستون باید جهت درستی داشته باشند تا نیروی سیلندر صحیح به دست آید.
هندسه 1
چرخش 1 (rot1)
1 | در پنجره Model Builder ، گره Component 1 (comp1) را گسترش دهید . |
2 | روی Component 1 (comp1)>Geometry 1 کلیک راست کرده و Transforms> Rotate را انتخاب کنید . |
3 | فقط اشیاء imp1(31) و imp1(32) را انتخاب کنید. |
4 | در پنجره تنظیمات برای چرخش ، قسمت Point on Axis of Rotation را پیدا کنید . |
5 | در قسمت متن y ، YCE را تایپ کنید . |
6 | در قسمت متن z ، ZCE را تایپ کنید . |
7 | قسمت Rotation را پیدا کنید . در قسمت Angle text cylRot را تایپ کنید . |
8 | از لیست نوع محور ، x-axis را انتخاب کنید . |
MULTIBODY DYNAMICS (MBD)
در پنجره Model Builder ، گره Component 1 (comp1)>Multibody Dynamics (mbd) را گسترش دهید .
پایه لولا-لینک1
مراکز اتصال را برای اتصالات قابل تنظیم پارامتر کنید.
1 | در پنجره Model Builder ، گره Component 1 (comp1)>Multibody Dynamics (mbd)>Hinge Base-Link1 را گسترش دهید ، سپس بر روی Hinge Base-Link1 کلیک کنید . |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت مرکز اتصال را پیدا کنید . |
3 | از لیست، User defined را انتخاب کنید . |
4 | بردار X c را به صورت مشخص کنید |
XC | ایکس |
mYL1 | y |
mZL1 | z |
لولا بوم1-لینک2
1 | در پنجره Model Builder ، روی Hinge Boom1-Link2 کلیک کنید . |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت مرکز اتصال را پیدا کنید . |
3 | از لیست، User defined را انتخاب کنید . |
4 | بردار X c را به صورت مشخص کنید |
XC | ایکس |
mYL2 | y |
mZL2 | z |
اسلات Link1-Link2
1 | در پنجره Model Builder ، روی Slot Link1-Link2 کلیک کنید . |
2 | در پنجره تنظیمات برای Slot Joint ، بخش مرکز اتصال را پیدا کنید . |
3 | از لیست، User defined را انتخاب کنید . |
4 | بردار X c را به صورت مشخص کنید |
XC | ایکس |
مایپ | y |
mZPE | z |
اسلات Link1-Piston1
1 | در پنجره Model Builder ، روی Slot Link1-Piston1 کلیک کنید . |
2 | در پنجره تنظیمات برای Slot Joint ، بخش مرکز اتصال را پیدا کنید . |
3 | از لیست، User defined را انتخاب کنید . |
4 | بردار X c را به صورت مشخص کنید |
XC | ایکس |
مایپ | y |
mZPE | z |
تعاریف جهانی
پارامترهای 1
1 | در پنجره Model Builder ، در قسمت Global Definitions روی Parameters 1 کلیک کنید . |
2 | در پنجره تنظیمات برای پارامترها ، بخش پارامترها را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
نام | اصطلاح | ارزش | شرح |
ExtLen | 5.5 [m] | 5.5 متر | طول کل پسوند |
مطالعه 1
چرخه بار را به بدترین سناریو تغییر دهید و محاسبه کنید.
مرحله 1: ثابت
1 | در پنجره Model Builder ، گره Study 1 را گسترش دهید ، سپس روی Step 1: Stationary کلیک کنید . |
2 | در پنجره تنظیمات برای Stationary ، بخش Study Extensions را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
نام پارامتر | لیست مقادیر پارامتر | واحد پارامتر |
Angle1 (زاویه به افقی، بوم داخلی) | محدوده (-45،15،90) | راد |
RelAng (زاویه بین بوم ها) | محدوده 0 0 0 (0،-15،-90) | راد |
4 | برای انتخاب ردیف شماره 3 در جدول کلیک کنید. |
5 |
6 | در نوار ابزار صفحه اصلی ، |
راه حل را برای پیکربندی اصلی ذخیره کنید.
راه حل 1 (sol1)
در پنجره Model Builder ، در قسمت Study 1>Solver Configurations روی Solution 1 (sol1) کلیک راست کرده و گزینه Solution>Copy را انتخاب کنید .
نتایج
جهانی 1
1 | در پنجره Model Builder ، گره Results>Boom Cylinder Forces را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | برای انتخاب ردیف شماره 2 در جدول کلیک کنید. |
4 |
5 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
abs(comp1.mbd.prj1.Fl1) | kN | بهینه شده است |
جهانی 2
1 | روی Results>Boom Cylinder Forces>Global 1 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش داده را پیدا کنید . |
3 | از فهرست مجموعه داده ، مطالعه 1/راه حل 1 – کپی 1 (sol2) را انتخاب کنید . |
4 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
abs(comp1.mbd.prj1.Fl1) | kN | اصلی |
نیروهای سیلندر اکستنشن
در پنجره Model Builder ، در قسمت Results روی Extension Cylinder Forces کلیک راست کرده و Delete را انتخاب کنید .
جهانی 1
1 | در پنجره Model Builder ، گره Results>Hinge Forces را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | برای انتخاب ردیف شماره 3 در جدول کلیک کنید. |
4 |
5 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.hgj1.Fy | kN | نیروی بهینه، y |
mbd.hgj1.Fz | kN | نیروی بهینه، z |
sqrt(mbd.hgj1.Fy^2+mbd.hgj1.Fz^2) | kN | نیروی کل بهینه شده |
جهانی 2
1 | روی Results>Hinge Forces>Global 1 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش داده را پیدا کنید . |
3 | از فهرست مجموعه داده ، مطالعه 1/راه حل 1 – کپی 1 (sol2) را انتخاب کنید . |
4 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.hgj1.Fy | kN | نیروی اصلی، y |
mbd.hgj1.Fz | kN | نیروی اصلی، z |
sqrt(mbd.hgj1.Fy^2+mbd.hgj1.Fz^2) | kN | نیروی کل اصلی |
مطالعه بهینه سازی را اضافه کنید.
مطالعه 1
بهينه سازي
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره تنظیمات برای بهینه سازی ، بخش Optimization Solver را پیدا کنید . |
3 | از لیست روش ، BOBYQA را انتخاب کنید . |
4 | در قسمت متنی Optimality tolerance ، 0.1 را تایپ کنید . |
5 | قسمت Objective Function را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | شرح | ارزیابی برای |
abs(comp1.mbd.prj1.Fl1) | نیروی سیلندر (داخلی) | ثابت |
6 | از لیست راه حل ، حداکثر اهداف را انتخاب کنید . |
7 | قسمت Control Variables and Parameters را پیدا کنید . |
8 | به پوشه Application Libraries مدل بروید و روی فایل crane_link_optimization_ctrlvars.txt دوبار کلیک کنید . |
9 | قسمت Constraints را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | کران پایین | کران بالا | ارزیابی برای |
mdL2PE-dL2PE | -0.01 | ثابت |
10 | قسمت Output while Solving را پیدا کنید . کادر Plot را انتخاب کنید . |
11 | از لیست گروه Plot ، Boom Cylinder Forces را انتخاب کنید . |
در صورتی که حالتی قابل حل نباشد، از توقف حلقه بهینه سازی خودداری کنید.
راه حل 1 (sol1)
1 | در پنجره Model Builder ، در قسمت Study 1>Solver Configurations>Solution 1 (sol1)>Stationary Solver 1 روی Parametric 1 کلیک کنید . |
2 | در پنجره تنظیمات برای پارامتر ، بخش عمومی را بیابید . |
3 | از لیست خطای On ، گزینه Store vala solution را انتخاب کنید . |
بهینه سازی را اجرا کنید.
4 | در نوار ابزار مطالعه ، |
نتایج
نیروهای سیلندر بوم
1 |
2 | در پنجره Model Builder ، در قسمت Results روی Boom Cylinder Forces کلیک کنید . |
3 | در نوار ابزار Boom Cylinder Forces ، روی |
نیروهای لولا
1 |
2 | در پنجره Model Builder ، روی Hinge Forces کلیک کنید . |
3 | در نوار ابزار Hinge Forces ، روی |



