
دینامیک نوار نقاله غلتکی
معرفی
نوار نقاله های غلتکی معمولاً در انبارها، واحدهای تولیدی و برنامه های جابجایی چمدان ها برای انتقال اجسام از یک مکان به مکان دیگر توسط گرانش، قدرت یا به صورت دستی استفاده می شوند. یک نوار نقاله غلتکی معمولی شامل مجموعه ای از غلتک های متحرک است که به صورت مستقیم یا منحنی چیده شده اند و توسط قاب ها پشتیبانی می شوند. به طور کلی از پلاستیک، فولاد نرم یا فولاد ضد زنگ ساخته شده است.
این مدل دینامیک یک نوار نقاله غلتکی که یک جسم کروی یا یک توپ را حمل می کند شبیه سازی می کند. در اینجا، غلتک های استوانه ای متعددی بین دو تیر با مقطع C قرار می گیرند. راهنماهای استوانه ای در دو طرف نوار نقاله برای جلوگیری از افتادن توپ از غلتک ها در نظر گرفته شده است. غلتک ها حول محورهای خود می چرخند، در حالی که قاب ها و راهنماهای جانبی ثابت هستند. با رسیدن به انتهای دیگر، توپ در یک سینی مستطیلی جمع می شود. تمام اجزای سیستم صلب فرض می شوند. با استفاده از تماس بدنه سفت و سخت با اصطکاک، تماس بین توپ و غلتک، گلوله و راهنماهای جانبی و همچنین توپ و سطوح سینی مدلسازی میشود. اتصال بین غلتک ها و قاب با استفاده از اتصالات لولا ساده شده است. یک مطالعه گذرا برای تجزیه و تحلیل دینامیک نیروهای توپ، تماس و اصطکاک انجام شده است.
تعریف مدل
هندسه مدل شامل سی غلتک استوانه ای یکسان با شعاع بیرونی 24 میلی متر و شعاع داخلی 21 میلی متر و عرض 450 میلی متر است. غلتک ها بین دو تیر منحنی C با عرض فلنج 100 میلی متر و ضخامت هر کدام 5 میلی متر قرار می گیرند. ارتفاع و ضخامت تار به ترتیب 40 میلی متر و 7 میلی متر است.
یک توپ کروی به شعاع 180 میلی متر روی غلتک اول قرار می گیرد. همانطور که در شکل 1 نشان داده شده است، پنج میله استوانه ای به عنوان راهنما در هر طرف نوار نقاله قرار داده شده اند تا با جلوگیری از افتادن در حین حرکت، توپ را روی غلتک ها نگه دارند. با رسیدن به انتهای دیگر، توپ در یک سینی مستطیلی سه وجهی جمع آوری می شود که در انتهای نوار نقاله نگه داشته می شود. تمام اجزای سیستم صلب فرض می شوند و از داده های مواد برای فولاد سازه استفاده می کنند.
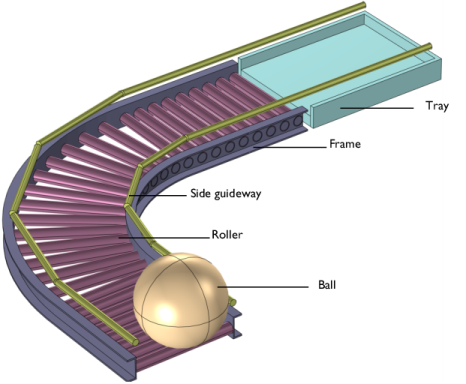
شکل 1: هندسه مدل نوار نقاله غلتکی.
اتصال بین غلتکها و قاب از طریق اتصالات لولا مدلسازی میشود که تنها یک درجه آزادی چرخشی در اطراف محورهای خود دارند. فریم ها، راهنماها و سینی فرض می شود که بدون هیچ گونه حرکت انتقالی یا چرخشی ثابت هستند. تمام غلتک ها با سرعت زاویه ای 765 دور در دقیقه می چرخند.
برای هر غلتک صلب، یک نقطه تماس با توپ کروی شکل وجود دارد. با استفاده از تماس بدنه صلب با قابلیت اصطکاک، تعامل بین هر غلتک و توپ به عنوان تماس های اصطکاکی مدل می شود. ضریب اصطکاک بین توپ و غلتک ها 0.1 در نظر گرفته شده است. کنتاکتهای اصطکاکی مشابهی برای مدلسازی برهمکنش توپ در تماس با راهنماهای استوانهای در هر دو طرف استفاده میشوند. با چرخش غلتک ها، توپ به دلیل این تماس های اصطکاکی به جلو حرکت می کند و در نهایت به انتهای نوار نقاله می رسد. در اینجا توپ در یک سینی مستطیلی سه وجهی جمع می شود. تماس بدنه صلب با قابلیت اصطکاک مجدداً برای مدلسازی تماس بین توپ و سطح پایین و سمت انتهایی سینی استفاده میشود. در دو طرف دیگر سینی، توپ توسط راهنماهای استوانه ای محافظت می شود.
یک مطالعه وابسته به زمان برای 8 ثانیه برای تجزیه و تحلیل دینامیک توپ و غلتک انجام می شود. نیروهای تماس و اصطکاک بین توپ و غلتک و اتلاف انرژی ناشی از اصطکاک نیز مورد مطالعه قرار گرفته است.
نتایج و بحث
شکل 2 جابجایی در توپ، غلطک ها، قاب ها، راهنماهای جانبی و سینی را نشان می دهد. از آنجایی که توپ در تماس با غلتک های دوار است، چرخش غلتک ها منجر به حرکت رو به جلو توپ می شود. شکل 3 سرعت زاویه ای سه غلتک نمونه را نشان می دهد. یکی در شروع، دوم در وسط و آخرین مورد در انتهای سیستم نوار نقاله غلتکی. در شکل 4 ، سرعت زاویه ای توپ در حال حرکت به سمت جلو به عنوان تابعی از زمان رسم شده است.
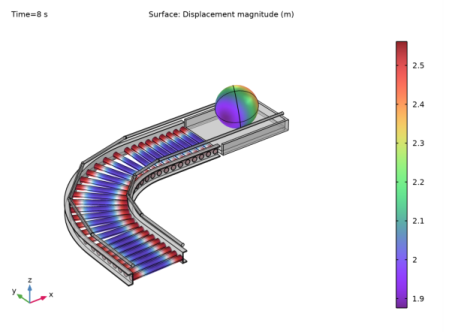
شکل 2: جابجایی اجزای مختلف سیستم نوار نقاله غلتکی در t = 8 s.
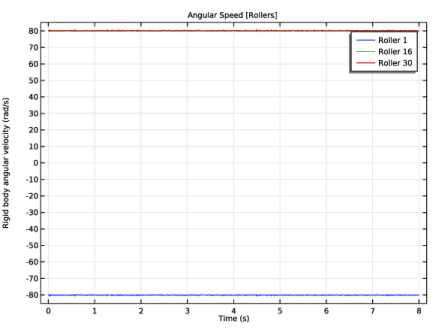
شکل 3: سرعت زاویه ای سه غلتک نمونه، به عنوان تابعی از زمان.
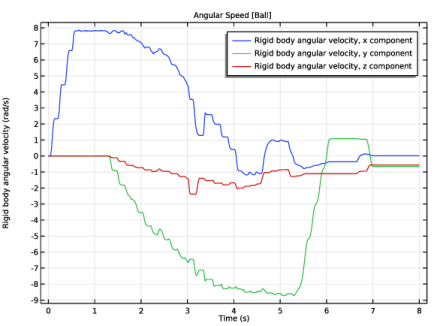
شکل 4: سرعت زاویه ای توپ، به عنوان تابعی از زمان.
نیروهای تماس و اصطکاک بین توپ و سه غلتک نمونه در شکل 5 نشان داده شده است . به طور مشابه، نیروهای تماس و اصطکاک بین توپ و چهار راهنما نمونه در شکل 6 نشان داده شده است . شکل 7 نیروهای تماس و اصطکاک بین توپ و سطوح سینی را نشان می دهد.
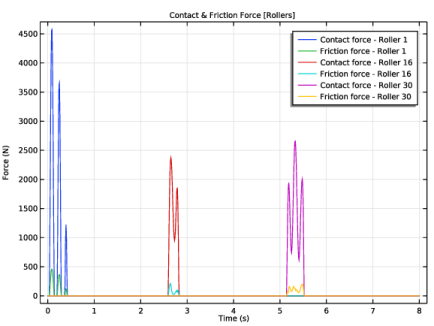
شکل 5: نیروهای تماس و اصطکاک بین توپ و سه غلتک نمونه بر حسب زمان.
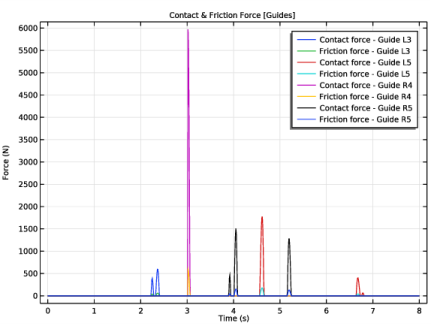
شکل 6: نیروهای تماس و اصطکاک بین توپ و راهنماها، به عنوان تابعی از زمان.
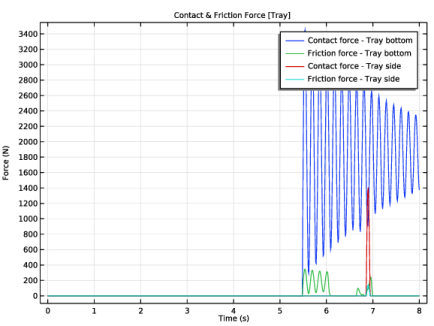
شکل 7: نیروهای تماس و اصطکاک بین توپ و سطوح سینی، به عنوان تابعی از زمان.
سرعت اتلاف انرژی اصطکاکی ناشی از تماس بین توپ و سه غلتک نمونه در شکل 8 نشان داده شده است . به طور مشابه، سرعت اتلاف انرژی اصطکاکی ناشی از تماس بین توپ و راهنماهای جانبی در شکل 9 نشان داده شده است . شکل 10 میزان اتلاف انرژی اصطکاکی را در اثر تماس بین توپ و سطوح سینی نشان می دهد.
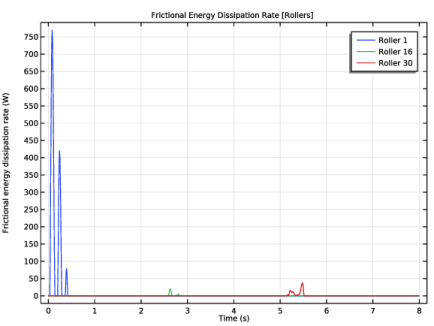
شکل 8: انرژی اصطکاک بین توپ و سه غلتک نمونه، به عنوان تابعی از زمان.
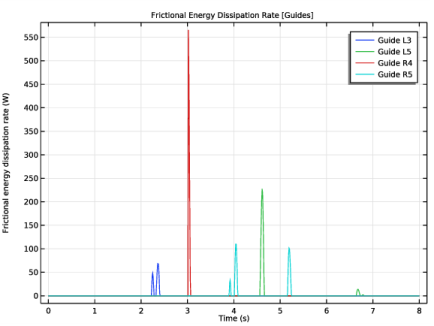
شکل 9: انرژی اصطکاک بین توپ و راهنماها، به عنوان تابعی از زمان.
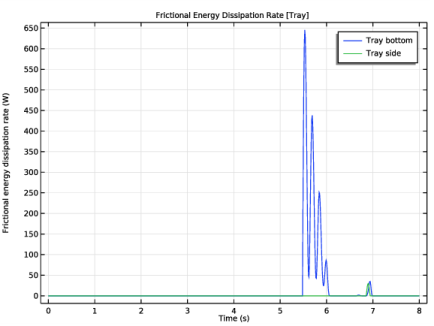
شکل 10: انرژی اصطکاک بین سطوح توپ و سینی، به عنوان تابعی از زمان.
نکاتی درباره پیاده سازی COMSOL
در این مدل، تمامی مولفهها با استفاده از گرههای Rigid Domain بهعنوان عناصر صلب مدلسازی میشوند که با استفاده از دکمه Create Rigid Domains در قسمت Automated Model Setup در پنجره تنظیمات برای رابط Multibody Dynamics ، میتوان آنها را بهطور خودکار ایجاد کرد .
مسیر کتابخانه برنامه: Multibody_Dynamics_Module/Tutorials/roller_conveyor_dynamics
دستورالعمل مدلسازی
از منوی File ، New را انتخاب کنید .
جدید
در پنجره جدید ، روی  Model Wizard کلیک کنید .
Model Wizard کلیک کنید .
مدل جادوگر
1 | در پنجره Model Wizard ، روی |
2 | در درخت Select Physics ، Structural Mechanics>Multibody Dynamics (mbd) را انتخاب کنید . |
3 | روی افزودن کلیک کنید . |
4 |
5 | در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
6 |
تعاریف جهانی
پارامترهای 1
1 | در پنجره Model Builder ، در قسمت Global Definitions روی Parameters 1 کلیک کنید . |
2 | در پنجره تنظیمات برای پارامترها ، بخش پارامترها را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل roller_conveyor_dynamics_parameters.txt دوبار کلیک کنید . |
اگر نمی خواهید هندسه را وارد کنید و انتخاب ایجاد کنید، می توانید دنباله هندسه را از مدل ذخیره شده بارگیری کنید. در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Geometry 1 کلیک راست کرده و Insert Sequence را انتخاب کنید . به پوشه Application Libraries مدل بروید و روی فایل roller_conveyor_dynamics.mph دوبار کلیک کنید . سپس می توانید به بخش ADD MATERIAL زیر بروید.
برای وارد کردن هندسه و ایجاد انتخاب از ابتدا، اینجا را ادامه دهید.
هندسه 1
واردات 1 (imp1)
1 | در پنجره Model Builder ، گره Component 1 (comp1)>Geometry 1 را گسترش دهید . |
2 | روی Geometry 1 کلیک راست کرده و Import را انتخاب کنید . |
3 | در پنجره تنظیمات برای واردات ، بخش واردات را پیدا کنید . |
4 |
5 | به پوشه Application Libraries مدل بروید و روی فایل roller_conveyor_dynamics.mphbin دوبار کلیک کنید . |
6 |
7 | قسمت Selections of Resulting Entities را پیدا کنید . تیک گزینه Resulting objects selection را انتخاب کنید . |
8 | تیک گزینه Individual object selections را انتخاب کنید . |
9 | از فهرست نمایش در فیزیک ، همه سطوح را انتخاب کنید . |
توپ
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب صریح ، توپ را در قسمت متن برچسب تایپ کنید . |
3 | در شیء imp1(14) فقط دامنه 1 را انتخاب کنید. |
4 | قسمت Color را پیدا کنید . از فهرست رنگ ، هیچکدام یا – اگر از دسکتاپ چند پلتفرمی استفاده میکنید – سفارشی را انتخاب کنید . در دسکتاپ cross-platform، روی دکمه Color کلیک کنید . |
5 | روی تعریف رنگ های سفارشی کلیک کنید . |
6 | مقادیر RGB را به ترتیب روی 247، 213 و 164 قرار دهید. |
7 | روی افزودن به رنگ های سفارشی کلیک کنید . |
8 | روی نمایش تنها پالت رنگ یا تأیید در دسکتاپ چند پلتفرمی کلیک کنید . |
9 |
مرزهای توپ
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب مجاور ، Ball Boundaries را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Input Entities را پیدا کنید . |
4 | در کادر محاوره ای افزودن ، توپ را در لیست انتخاب های ورودی انتخاب کنید . |
5 | روی OK کلیک کنید . |
قاب ها
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب صریح ، Frames را در قسمت متن برچسب تایپ کنید . |
3 | در شیء imp1(1) فقط دامنه 1 را انتخاب کنید. |
4 | در شیء imp1(23) فقط دامنه 1 را انتخاب کنید. |
5 | قسمت Color را پیدا کنید . از فهرست رنگ ، هیچکدام یا – اگر از دسکتاپ چند پلتفرمی استفاده میکنید – سفارشی را انتخاب کنید . در دسکتاپ cross-platform، روی دکمه Color کلیک کنید . |
6 | روی تعریف رنگ های سفارشی کلیک کنید . |
7 | مقادیر RGB را به ترتیب روی 100، 100 و 128 قرار دهید. |
8 | روی افزودن به رنگ های سفارشی کلیک کنید . |
9 | روی نمایش تنها پالت رنگ یا تأیید در دسکتاپ چند پلتفرمی کلیک کنید . |
10 |
راهنماها
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب صریح ، Guides را در قسمت نوشتار برچسب تایپ کنید . |
3 | در شیء imp1(17) فقط دامنه 1 را انتخاب کنید. |
4 | در شی imp1(2) فقط دامنه های 1 و 2 را انتخاب کنید. |
5 | در شیء imp1(22) فقط دامنه 1 را انتخاب کنید. |
6 | در شیء imp1(25) فقط دامنه 1 را انتخاب کنید. |
7 | در شیء imp1(26) فقط دامنه 1 را انتخاب کنید. |
8 | در شیء imp1(29) فقط دامنه 1 را انتخاب کنید. |
9 | در شیء imp1(3) فقط دامنه 1 را انتخاب کنید. |
10 | در شیء imp1(33) فقط دامنه های 1 و 2 را انتخاب کنید. |
11 | قسمت Color را پیدا کنید . از فهرست رنگ ، هیچکدام یا – اگر از دسکتاپ چند پلتفرمی استفاده میکنید – سفارشی را انتخاب کنید . در دسکتاپ cross-platform، روی دکمه Color کلیک کنید . |
12 | روی تعریف رنگ های سفارشی کلیک کنید . |
13 | مقادیر RGB را به ترتیب 178، 186 و 93 قرار دهید. |
14 | روی افزودن به رنگ های سفارشی کلیک کنید . |
15 | روی نمایش تنها پالت رنگ یا تأیید در دسکتاپ چند پلتفرمی کلیک کنید . |
16 |
سینی
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب صریح ، Tray را در قسمت متن برچسب تایپ کنید . |
3 | در شی imp1(42) فقط دامنه های 1 و 2 را انتخاب کنید. |
4 | قسمت Color را پیدا کنید . از فهرست رنگ ، هیچکدام یا – اگر از دسکتاپ چند پلتفرمی استفاده میکنید – سفارشی را انتخاب کنید . در دسکتاپ cross-platform، روی دکمه Color کلیک کنید . |
5 | روی تعریف رنگ های سفارشی کلیک کنید . |
6 | مقادیر RGB را به ترتیب روی 149، 200 و 200 قرار دهید. |
7 | روی افزودن به رنگ های سفارشی کلیک کنید . |
8 | روی نمایش تنها پالت رنگ یا تأیید در دسکتاپ چند پلتفرمی کلیک کنید . |
9 |
غلتک
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای انتخاب تفاوت ، Rollers را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Input Entities را پیدا کنید . |
4 | در کادر محاورهای افزودن ، وارد کردن 1 را در لیست انتخابها برای افزودن انتخاب کنید . |
5 | روی OK کلیک کنید . |
6 | در پنجره Settings for Difference Selection ، بخش Input Entities را پیدا کنید . |
7 |
8 | در کادر محاورهای افزودن ، در فهرست انتخابها برای تفریق ، توپ ، فریم ، راهنماها و سینی را انتخاب کنید . |
9 | روی OK کلیک کنید . |
10 | در پنجره تنظیمات برای انتخاب تفاوت ، قسمت Color را پیدا کنید . |
11 | از فهرست رنگ ، هیچکدام یا – اگر از دسکتاپ چند پلتفرمی استفاده میکنید – سفارشی را انتخاب کنید . در دسکتاپ cross-platform، روی دکمه Color کلیک کنید . |
12 | روی تعریف رنگ های سفارشی کلیک کنید . |
13 | مقادیر RGB را به ترتیب روی 149، 100 و 128 قرار دهید. |
14 | روی افزودن به رنگ های سفارشی کلیک کنید . |
15 | روی نمایش تنها پالت رنگ یا تأیید در دسکتاپ چند پلتفرمی کلیک کنید . |
16 |
مرزهای غلتک
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Ball Boundaries (adjsel1) راست کلیک کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای انتخاب مجاور ، Rollers Boundaries را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Input Entities را پیدا کنید . در فهرست انتخابهای ورودی ، توپ را انتخاب کنید . |
4 |
5 |
6 | در کادر محاورهای افزودن ، Rollers را در فهرست انتخابهای ورودی انتخاب کنید . |
7 | روی OK کلیک کنید . |
8 | در پنجره Settings for Adjacent Selection ، بخش Input Entities را پیدا کنید . |
9 | در فهرست انتخابهای ورودی ، Rollers را انتخاب کنید . |
10 |
مرزهای ثابت
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Rollers (difsel1) کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای انتخاب تفاوت ، Fixed Boundaries را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Geometric Entity Level را پیدا کنید . از لیست Level ، Boundary را انتخاب کنید . |
4 | قسمت Input Entities را پیدا کنید . |
5 | در کادر محاورهای افزودن ، وارد کردن 1 را در لیست انتخابها برای افزودن انتخاب کنید . |
6 | روی OK کلیک کنید . |
7 | در پنجره Settings for Difference Selection ، بخش Input Entities را پیدا کنید . |
8 |
9 | در کادر محاورهای افزودن ، در فهرست انتخابها برای تفریق ، مرزهای توپ و مرزهای غلتکی را انتخاب کنید . |
10 | روی OK کلیک کنید . |
11 | در پنجره تنظیمات برای انتخاب تفاوت ، قسمت Color را پیدا کنید . |
12 | از لیست رنگ ، هیچکدام را انتخاب کنید . |
13 |
توپ (sel1)، مرز توپ (adjsel1)، مرز ثابت (difsel2)، قاب (sel2)، راهنما (sel3)، غلتک (difsel1)، مرز غلتک (adjsel2)، سینی (sel4)
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1، برای انتخاب توپ (sel1) ، مرزهای توپ (adjsel1) ، فریم ها (sel2) ، راهنماها (sel3) ، سینی (sel4) ، غلتک ها (difsel1)، Ctrl کلیک کنید. ) ، مرزهای غلتکی (adjsel2) و مرزهای ثابت (difsel2) . |
2 | کلیک راست کرده و Group را انتخاب کنید . |
انتخاب ها
در پنجره تنظیمات برای گروه ، Selections را در قسمت متن برچسب تایپ کنید .
فرم اتحادیه (فین)
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Form Union (fin) کلیک کنید . |
2 | در پنجره تنظیمات Form Union/Assembly ، بخش Form Union/Assembly را پیدا کنید . |
3 | از لیست Action ، Form an assembly را انتخاب کنید . |
4 | تیک Create Pairs را پاک کنید . |
5 |
مواد را اضافه کنید
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Material بروید . |
3 | در درخت، Built-in>Structural steel را انتخاب کنید . |
4 | روی Add to Component در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
MULTIBODY DYNAMICS (MBD)
برای تولید گره های دامنه سفت و سخت برای همه مؤلفه ها به صورت زیر عمل کنید.
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Multibody Dynamics (mbd) کلیک کنید . |
2 | در پنجره تنظیمات برای Multibody Dynamics ، روی Physics Node Generation در گوشه سمت راست بالای بخش Automated Model Setup کلیک کنید . از منو، Create Rigid Domains را انتخاب کنید . |
دامنه سفت و سخت: قاب سمت چپ
1 | در پنجره Model Builder ، گره Rigid Domains (All) را گسترش دهید ، سپس روی Rigid Domain 1 کلیک کنید . |
2 | در پنجره تنظیمات برای دامنه سفت ، در قسمت نوشتار برچسب ، عبارت Rigid Domain: Left Frame را تایپ کنید . |
دامنه های سفت و سخت
1 | به طور مشابه ، با استفاده از اطلاعات ارائه شده در جدول زیر، نام سایر گره های دامنه سفت و سخت را تغییر دهید. |
دامنه سفت و سخت | نام |
دامنه سفت و سخت 1 | دامنه سفت و سخت: قاب سمت چپ |
دامنه سفت و سخت 2 | دامنه سفت و سخت: راهنمای L1 |
دامنه سفت و سخت 3 | دامنه سفت و سخت: راهنمای R1 |
دامنه سفت و سخت 4 | دامنه صلب: راهنمای L2 |
دامنه سفت و سخت 5 | دامنه سفت و سخت: غلتک 1 |
دامنه صلب 6 | دامنه سفت و سخت: Roller 2 |
دامنه سفت و سخت 7 | دامنه سفت و سخت: Roller 3 |
دامنه سفت و سخت 8 | دامنه سفت و سخت: Roller 4 |
دامنه سفت و سخت 9 | دامنه سفت و سخت: Roller 5 |
دامنه سفت و سخت 10 | دامنه سفت و سخت: Roller 6 |
دامنه سفت و سخت 11 | دامنه سفت و سخت: Roller 7 |
دامنه سفت و سخت 12 | دامنه سفت و سخت: Roller 8 |
دامنه سفت و سخت 13 | دامنه سفت و سخت: Roller 9 |
دامنه سفت و سخت 14 | دامنه سفت و سخت: Roller 10 |
دامنه صلب 15 | دامنه سفت و سخت: Roller 11 |
دامنه سفت و سخت 16 | دامنه سفت و سخت: Roller 12 |
دامنه سفت و سخت 17 | دامنه سفت و سخت: توپ |
دامنه سفت و سخت 18 | دامنه سفت و سخت: راهنمای L3 |
دامنه سفت و سخت 19 | دامنه سفت و سخت: Roller 13 |
دامنه سفت و سخت 20 | دامنه سفت و سخت: Roller 14 |
دامنه سفت و سخت 21 | دامنه سفت و سخت: Roller 15 |
دامنه سفت و سخت 22 | دامنه سفت و سخت: Roller 16 |
دامنه سفت و سخت 23 | دامنه صلب: راهنمای R2 |
دامنه صلب 24 | دامنه سفت و سخت: قاب سمت راست |
دامنه صلب 25 | دامنه سفت و سخت: Roller 17 |
دامنه صلب 26 | دامنه سفت و سخت: راهنمای L4 |
دامنه سفت و سخت 27 | دامنه سفت و سخت: راهنمای R3 |
دامنه سفت و سخت 28 | دامنه صلب: Roller 18 |
دامنه سفت و سخت 29 | دامنه سفت و سخت: Roller 19 |
دامنه سفت و سخت 30 | دامنه سفت و سخت: راهنمای R4 |
دامنه سفت و سخت 31 | دامنه سفت و سخت: Roller 20 |
دامنه سفت و سخت 32 | دامنه سفت و سخت: Roller 21 |
دامنه سفت و سخت 33 | دامنه سفت و سخت: Roller 22 |
دامنه سفت و سخت 34 | دامنه سفت و سخت: راهنمای R5 |
دامنه سفت و سخت 35 | دامنه سفت و سخت: راهنمای L5 |
دامنه سفت و سخت 36 | دامنه سفت و سخت: Roller 23 |
دامنه سفت و سخت 37 | دامنه سفت و سخت: Roller 24 |
دامنه سفت و سخت 38 | دامنه سفت و سخت: Roller 25 |
دامنه سفت و سخت 39 | دامنه سفت و سخت: Roller 26 |
دامنه سفت و سخت 40 | دامنه سفت و سخت: Roller 27 |
دامنه صلب 41 | دامنه سفت و سخت: Roller 28 |
دامنه صلب 42 | دامنه سفت و سخت: Roller 29 |
دامنه سفت و سخت 43 | دامنه سفت و سخت: Roller 30 |
دامنه سفت و سخت 44 | دامنه سفت و سخت: سینی |
2 | در پنجره Model Builder ، روی Rigid Domain: Left Frame کلیک کنید . |
محدودیت ثابت 1
در نوار ابزار Physics ، روی Attributes کلیک کنید و Fixed Constraint را انتخاب کنید .
به طور مشابه، گرههای محدودیت ثابت را به دامنه صلب اضافه کنید : قاب راست ، دامنه صلب: راهنمای L1 ، دامنه صلب: راهنمای L2 ، دامنه صلب: راهنمای L3 ، دامنه صلب: راهنمای L4 ، دامنه صلب: راهنما L5 ، دامنه Rigidma : : Guide R2 , Rigid Domain: Guide R3 , Rigid Domain: Guide R4 , Rigid Domain: Guide R5 and Rigid Domain: Tray .
برای ایجاد گره های مفصل لولا بین غلتک ها و قاب سمت چپ به صورت زیر عمل کنید .
مفصل لولا 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت انتخاب پیوست را پیدا کنید . |
3 | از فهرست منبع ، دامنه سفت و سخت : قاب چپ را انتخاب کنید . |
4 | از لیست مقصد ، دامنه سفت و سخت : Roller 1 را انتخاب کنید . |
مرکز مشترک: مرز 1
1 | در پنجره Model Builder ، روی Center of Joint: Boundary 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : مرز ، قسمت انتخاب مرز را پیدا کنید . |
3 | از لیست Selection ، Object 4 (Import 1) را انتخاب کنید . |
مفصل لولا 1
1 | در پنجره Model Builder ، روی Hinge Joint 1 کلیک کنید . |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، بخش Axis of Joint را پیدا کنید . |
3 | از لیست، انتخاب یک لبه موازی را انتخاب کنید . |
محور مشترک 1
1 | در پنجره Model Builder ، روی Joint Axis 1 کلیک کنید . |
2 | فقط Edge 74 را انتخاب کنید. |
مفصل لولا 1
در پنجره Model Builder ، روی Hinge Joint 1 کلیک کنید .
حرکت تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای حرکت تجویز شده ، قسمت حرکت چرخشی تجویز شده را پیدا کنید . |
3 | از لیست حرکت تجویز شده ، سرعت زاویه ای را انتخاب کنید . |
4 | در قسمت متن ω p ، omega را تایپ کنید . |
مفاصل لولا
به طور مشابه، بیست و نه گره مفصل لولای دیگر را بین قاب سمت چپ و غلتکها با کپی کردن مفصل لولا 1 و تنظیم مجدد ورودیها با استفاده از اطلاعات ارائه شده در جدول زیر ایجاد کنید .
مفصل لولا | منبع | مقصد | مرکز مشترک: مرز | محور مشترک |
مفصل لولا 1 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: غلتک 1 | 29-38 | 74 |
مفصل لولا 2 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 2 | 39-48 | 98 |
مفصل لولا 3 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 3 | 49-58 | 122 |
مفصل لولا 4 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 4 | 59-68 | 146 |
مفصل لولا 5 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 5 | 69-78 | 170 |
مفصل لولا 6 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 6 | 79-88 | 194 |
مفصل لولا 7 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 7 | 89-98 | 218 |
مفصل لولا 8 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 8 | 99-108 | 242 |
مفصل لولا 9 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 9 | 109-118 | 266 |
مفصل لولا 10 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 10 | 119-128 | 290 |
مفصل لولا 11 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 11 | 137-146 | 326 |
مفصل لولا 12 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 12 | 147-156 | 350 |
مفصل لولا 13 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 13 | 163-172 | 386 |
مفصل لولا 14 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 14 | 173-182 | 410 |
مفصل لولا 15 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 15 | 183-192 | 434 |
مفصل لولا 16 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 16 | 193-202 | 458 |
مفصل لولا 17 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 17 | 219-228 | 518 |
مفصل لولا 18 | دامنه سفت و سخت: قاب سمت چپ | دامنه صلب: Roller 18 | 241-250 | 566 |
مفصل لولا 19 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 19 | 251-260 | 590 |
مفصل لولا 20 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 20 | 267-276 | 626 |
مفصل لولا 21 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 21 | 277-286 | 650 |
مفصل لولا 22 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 22 | 287-296 | 677 |
مفصل لولا 23 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 23 | 309-318 | 725 |
مفصل لولا 24 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 24 | 319-328 | 749 |
مفصل لولا 25 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 25 | 329-338 | 773 |
مفصل لولا 26 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 26 | 339-348 | 797 |
مفصل لولا 27 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 27 | 349-358 | 821 |
مفصل لولا 28 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 28 | 359-368 | 845 |
مفصل لولا 29 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 29 | 369-378 | 869 |
مفصل لولا 30 | دامنه سفت و سخت: قاب سمت چپ | دامنه سفت و سخت: Roller 30 | 379-388 | 893 |
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) ، Ctrl-کلیک کنید تا Long Joint 1 به Hinge Joint 30 را انتخاب کنید . کلیک راست کرده و Group را انتخاب کنید .
مفاصل لولا
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Group 2 کلیک کنید . |
2 | در پنجره تنظیمات برای گروه ، در فیلد نوشتار برچسب، اتصالات لولا را تایپ کنید . |
برای ایجاد گره های تماس با بدن سفت و سخت بین توپ و غلتک ها به صورت زیر عمل کنید .
تماس بدنه صلب 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای تماس با بدن سفت ، بخش منبع را پیدا کنید . |
3 | از فهرست منبع ، Rigid Domain: Ball را انتخاب کنید . |
4 | قسمت مقصد را پیدا کنید . از لیست Shape ، استوانه ای را انتخاب کنید . |
5 | از لیست مقصد ، دامنه سفت و سخت : Roller 1 را انتخاب کنید . |
6 | تیک استفاده از طول محدود را انتخاب کنید . |
7 | قسمت تنظیمات تماس را پیدا کنید . در قسمت متن f p ، fp را تایپ کنید . |
اصطکاک 1
1 | در نوار ابزار فیزیک ، روی |
2 | در پنجره تنظیمات برای اصطکاک ، قسمت اصطکاک را پیدا کنید . |
3 | در قسمت متن μ ، mu را تایپ کنید . |
4 | در قسمت متن v 0 ، mbd.diag*1e-3[1/s]*10 را تایپ کنید . |
اطلاعات تماس توپ-غلتک
به طور مشابه، بیست و نه گره تماس با بدن سفت و سخت دیگر را بین توپ و غلتکها با کپی کردن Rigid Body Contact 1 و تنظیم مجدد ورودیها با استفاده از اطلاعات ارائه شده در جدول زیر ایجاد کنید.
نام | منبع | مقصد |
تماس بدنه صلب 1 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: غلتک 1 |
تماس بدنه سفت و سخت 2 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 2 |
تماس بدنه سفت و سخت 3 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 3 |
تماس بدنه سفت و سخت 4 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 4 |
تماس بدنه سفت و سخت 5 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 5 |
تماس بدنه صلب 6 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 6 |
تماس بدنه سفت و سخت 7 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 7 |
تماس بدنه سفت و سخت 8 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 8 |
تماس بدنه سفت و سخت 9 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 9 |
تماس بدنه سفت و سخت 10 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 10 |
تماس بدنه سخت 11 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 11 |
تماس بدنه سخت 12 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 12 |
تماس بدنه سفت و سخت 13 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 13 |
تماس بدنه صلب 14 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 14 |
تماس بدنه صلب 15 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 15 |
تماس بدنه سخت 16 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 16 |
تماس بدنه سفت و سخت 17 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 17 |
تماس بدنه سفت و سخت 18 | دامنه سفت و سخت: توپ | دامنه صلب: Roller 18 |
تماس بدنه سفت و سخت 19 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 19 |
تماس با بدن سفت و سخت 20 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 20 |
تماس با بدن سفت و سخت 21 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 21 |
تماس با بدن سفت و سخت 22 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 22 |
تماس با بدن سفت و سخت 23 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 23 |
تماس با بدن سفت و سخت 24 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 24 |
تماس بدنه صلب 25 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 25 |
تماس بدنه سفت و سخت 26 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 26 |
تماس با بدن سفت و سخت 27 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 27 |
تماس بدنه سفت و سخت 28 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 28 |
تماس بدنه سفت و سخت 29 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 29 |
تماس بدنه سفت و سخت 30 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: Roller 30 |
با کپی کردن Rigid Body Contact 30 و تنظیم مجدد مقادیر ورودی، گره های تماس با بدن صلب را بین گوی و راهنماهای جانبی اضافه کنید .
تماس بدنه سفت و سخت 31
1 | روی Friction 1 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای مخاطب سفت و سخت ، قسمت مقصد را پیدا کنید . |
3 | از لیست مقصد ، دامنه سفت و سخت را انتخاب کنید : راهنمای L1 . |
Ball-Guides مخاطبین
به طور مشابه، با تکثیر Rigid Body Contact 31 و تنظیم مجدد ورودی ها با استفاده از اطلاعات ارائه شده در جدول زیر، 9 گره تماس با بدن سفت و سخت بین توپ و راهنماهای جانبی ایجاد کنید.
نام | منبع | مقصد |
تماس بدنه سفت و سخت 31 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: راهنمای L1 |
تماس بدنه سفت و سخت 32 | دامنه سفت و سخت: توپ | دامنه صلب: راهنمای L2 |
تماس بدنه سفت و سخت 33 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: راهنمای L3 |
تماس بدنه سفت و سخت 34 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: راهنمای L4 |
تماس بدنه سفت و سخت 35 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: راهنمای L5 |
تماس بدنه سفت و سخت 36 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: راهنمای R1 |
تماس بدنه سفت و سخت 37 | دامنه سفت و سخت: توپ | دامنه صلب: راهنمای R2 |
تماس بدنه سفت و سخت 38 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: راهنمای R3 |
تماس بدنه سفت و سخت 39 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: راهنمای R4 |
تماس با بدن سفت و سخت 40 | دامنه سفت و سخت: توپ | دامنه سفت و سخت: راهنمای R5 |
تماس بدنه سفت و سخت 32
با کپی کردن Rigid Body Contact 40 و تنظیم مجدد مقادیر ورودی، گره های تماس با بدن سفت را بین سطوح توپ و سینی اضافه کنید .
تماس بدنه سفت و سخت 41
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Rigid Body Contact 32 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای مخاطب سفت و سخت ، قسمت مقصد را پیدا کنید . |
3 | از لیست Shape ، Planar را انتخاب کنید . |
4 | قسمت انتخاب مرز ، مقصد را پیدا کنید . برای انتخاب دکمه ضامن |
5 | فقط Boundary 397 را انتخاب کنید. |
تماس بدنه سخت 42
1 | روی Rigid Body Contact 41 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای تماس با بدن سفت و سخت ، قسمت انتخاب مرز ، مقصد را پیدا کنید . |
3 |
4 | فقط Boundary 403 را انتخاب کنید. |
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) ، برای انتخاب Rigid Body Contact 1 تا Rigid Body Contact 30، Ctrl کلیک کنید . کلیک راست کرده و Group را انتخاب کنید .
اطلاعات تماس توپ-غلتک
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Group 3 کلیک کنید . |
2 | در پنجره تنظیمات برای گروه ، Ball-Rollers Contacts را در قسمت متن برچسب تایپ کنید . |
کنتاکت بدن سفت و سخت 31، کنتاکت بدن سفت و سخت 32، کنتاکت بدن سفت و سخت 33، کنتاکت بدن سفت و سخت 34، کنتاکت بدن سفت و سخت 35، کنتاکت بدن سفت و سخت 36، کنتاکت بدن سفت و سخت 37، کنتاکت بدن سفت و سخت 38، کنتاکت بدن سفت و سخت 39، تماس با بدن سفت و سخت
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) ، برای انتخاب Rigid Body Contact 31 ، Rigid Body Contact 32 ، Rigid Body Contact 33 ، Rigid Body Contact 34 ، Rigid Body Contact 35 ، Ctrl کلیک کنید. بادی کنتاکت 36 , کنتاکت بدن سفت و سخت 37 , کنتاکت بدن سفت و سخت 38 , کنتاکت بدن سفت و سخت 39 و کنتاکت بدن سفت و سخت 40 . |
2 | کلیک راست کرده و Group را انتخاب کنید . |
Ball-Guides مخاطبین
در پنجره تنظیمات گروه ، Ball-Guides Contacts را در قسمت نوشتار برچسب تایپ کنید .
کنتاکت بدنه صلب 41، کنتاکت بدنه صلب 42
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) ، روی Ctrl کلیک کنید تا Rigid Body Contact 41 و Rigid Body Contact 42 را انتخاب کنید . |
2 | کلیک راست کرده و Group را انتخاب کنید . |
مخاطبین سینی توپ
در پنجره تنظیمات گروه ، Ball-Tray Contacts را در قسمت نوشتار برچسب تایپ کنید .
جاذبه 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Gravity ، بخش انتخاب دامنه را پیدا کنید . |
3 | از لیست انتخاب ، توپ را انتخاب کنید . |
مش 1
مثلثی رایگان 1
1 | در نوار ابزار Mesh ، روی |
2 | در پنجره تنظیمات برای Free Triangular ، بخش Boundary Selection را پیدا کنید . |
3 |
4 | در کادر محاوره ای Paste Selection ، 13، 19، 23، 29، 39، 49، 59، 69، 79، 89، 99، 109، 119، 137، 147، 157، 162، 163، 173،193 را تایپ کنید. 203 ، 219 ، 229 ، 234 ، 235 ، 240 ، 241 ، 251 ، 261 ، 266 ، 267 ، 277 ، 290 ، 297 ، 302 ، 312 ، 322 ، 332 ، 342 ، 352 ، 362 ، 372 ، 382 در زمینه متن انتخاب . |
5 | روی OK کلیک کنید . |
سایز 1
1 | روی Free Triangular 1 کلیک راست کرده و Size را انتخاب کنید . |
2 | در پنجره تنظیمات برای اندازه ، قسمت اندازه عنصر را پیدا کنید . |
3 | از لیست Predefined ، Finer را انتخاب کنید . |
اندازه
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Mesh 1 روی Size کلیک کنید . |
2 | در پنجره تنظیمات برای اندازه ، قسمت اندازه عنصر را پیدا کنید . |
3 | از لیست Predefined ، Finer را انتخاب کنید . |
نقشه برداری 1
1 | در نوار ابزار Mesh ، روی |
2 | فقط Boundary 397 را انتخاب کنید. |
توزیع 1
1 | روی Mapped 1 کلیک راست کرده و Distribution را انتخاب کنید . |
2 | فقط لبه های 917 و 926 را انتخاب کنید. |
3 | در پنجره تنظیمات برای توزیع ، بخش توزیع را پیدا کنید . |
4 | در قسمت متنی Number of Elements عدد 25 را تایپ کنید . |
جارو 1
1 | در نوار ابزار Mesh ، روی |
2 | در پنجره تنظیمات برای Swept ، بخش انتخاب دامنه را پیدا کنید . |
3 | از لیست سطح نهاد هندسی ، دامنه را انتخاب کنید . |
4 | از لیست انتخاب ، همه دامنه ها را انتخاب کنید . |
5 | فقط دامنه های 1-14، 16-43 و 45 را انتخاب کنید. |
توزیع 1
1 | روی Swept 1 کلیک راست کرده و Distribution را انتخاب کنید . |
2 | در پنجره تنظیمات برای توزیع ، بخش انتخاب دامنه را پیدا کنید . |
3 | از لیست انتخاب ، Frames را انتخاب کنید . |
4 | بخش توزیع را پیدا کنید . در قسمت متنی Number of Elements عدد 50 را تایپ کنید . |
توزیع 2
1 | در پنجره Model Builder ، روی Swept 1 کلیک راست کرده و Distribution را انتخاب کنید . |
2 | در پنجره تنظیمات برای توزیع ، بخش انتخاب دامنه را پیدا کنید . |
3 | از لیست انتخاب ، راهنماها را انتخاب کنید . |
4 | بخش توزیع را پیدا کنید . در قسمت متنی Number of Elements عدد 20 را تایپ کنید . |
توزیع 3
1 | روی Swept 1 کلیک راست کرده و Distribution را انتخاب کنید . |
2 | در پنجره تنظیمات برای توزیع ، بخش انتخاب دامنه را پیدا کنید . |
3 | از لیست انتخاب ، Rollers را انتخاب کنید . |
4 | بخش توزیع را پیدا کنید . در فیلد متنی Number of element ، 10 را تایپ کنید . |
چهار وجهی رایگان 1
در نوار ابزار Mesh ، روی Free Tetrahedral کلیک کنید .
سایز 1
1 | روی Free Tetrahedral 1 کلیک راست کرده و Size را انتخاب کنید . |
2 | در پنجره تنظیمات برای اندازه ، قسمت اندازه عنصر را پیدا کنید . |
3 | از لیست Predefined ، Finer را انتخاب کنید . |
4 | قسمت انتخاب موجودیت هندسی را پیدا کنید . از لیست سطح نهاد هندسی ، دامنه را انتخاب کنید . |
5 | فقط دامنه 44 را انتخاب کنید. |
سایز ۲
1 | در پنجره Model Builder ، روی Free Tetrahedral 1 کلیک راست کرده و Size را انتخاب کنید . |
2 | در پنجره تنظیمات برای اندازه ، قسمت انتخاب موجودیت هندسی را پیدا کنید . |
3 | از لیست سطح نهاد هندسی ، دامنه را انتخاب کنید . |
4 | فقط دامنه 15 را انتخاب کنید. |
5 | بخش اندازه عنصر را پیدا کنید . از لیست از پیش تعریف شده ، Extremely fine را انتخاب کنید . |
6 |
مطالعه 1
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در بخش مطالعه 1 ، روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
3 | در قسمت متنی زمان خروجی ، range(0,0.01,8) را تایپ کنید . |
راه حل 1 (sol1)
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره Model Builder ، گره Solution 1 (sol1) را گسترش دهید . |
3 | در پنجره Model Builder ، گره Study 1>Solver Configurations>Solution 1 (sol1)>Time-Dependent Solver 1 را گسترش دهید ، سپس روی Fully Coupled 1 کلیک کنید . |
4 | در پنجره Settings for Fully Coupled ، برای گسترش بخش Method and Termination کلیک کنید . |
5 | در قسمت حداکثر تعداد تکرار ، 15 را تایپ کنید . |
6 | در پنجره Model Builder ، در قسمت Study 1>Solver Configurations>Solution 1 (sol1) روی Time-Dependent Solver 1 کلیک کنید . |
7 | در پنجره تنظیمات برای حل وابسته به زمان ، برای گسترش بخش Time Steping کلیک کنید . |
8 | از لیست مراحل انجام شده توسط حل کننده ، Intermediate را انتخاب کنید . |
9 | در نوار ابزار مطالعه ، |
نتایج
برای ترسیم جابجایی سیستم همانطور که در شکل 2 نشان داده شده است، دستورالعمل های زیر را دنبال کنید .
جابجایی (mbd)
در پنجره Model Builder ، گره Results>Displacement (mbd) را گسترش دهید .
انتخاب 1
1 | در پنجره Model Builder ، Results>Displacement (mbd)>Surface node را گسترش دهید. |
2 | روی Surface کلیک راست کرده و Selection را انتخاب کنید . |
3 | در پنجره تنظیمات برای انتخاب ، قسمت انتخاب را پیدا کنید . |
4 | از لیست Selection ، Ball Boundaries را انتخاب کنید . |
سطح 2
در پنجره Model Builder ، روی Surface کلیک راست کرده و Duplicate را انتخاب کنید .
انتخاب 1
1 | در پنجره Model Builder ، گره Surface 2 را گسترش دهید ، سپس روی Selection 1 کلیک کنید . |
2 | در پنجره تنظیمات برای انتخاب ، قسمت انتخاب را پیدا کنید . |
3 | از لیست انتخاب ، Rollers Boundaries را انتخاب کنید . |
سطح 2
1 | در پنجره Model Builder ، روی Surface 2 کلیک کنید . |
2 | در پنجره تنظیمات برای Surface ، برای گسترش بخش عنوان کلیک کنید . |
3 | از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
4 | قسمت Coloring and Style را پیدا کنید . تیک Color legend را پاک کنید . |
5 | از لیست جدول رنگ ، WaveLight را انتخاب کنید . |
سطح 3
روی Results>Displacement (mbd)>Surface 2 کلیک راست کرده و Duplicate را انتخاب کنید .
انتخاب 1
1 | در پنجره Model Builder ، گره Surface 3 را گسترش دهید ، سپس روی Selection 1 کلیک کنید . |
2 | در پنجره تنظیمات برای انتخاب ، قسمت انتخاب را پیدا کنید . |
3 | از لیست انتخاب ، Fixed Boundaries را انتخاب کنید . |
سطح 3
1 | در پنجره Model Builder ، روی Surface 3 کلیک کنید . |
2 | در پنجره تنظیمات برای Surface ، بخش Coloring and Style را پیدا کنید . |
3 | از لیست Coloring ، Uniform را انتخاب کنید . |
4 | از لیست رنگ ، خاکستری را انتخاب کنید . |
شفافیت 1
1 | روی Surface 3 کلیک راست کرده و Transparency را انتخاب کنید . |
2 | در نوار ابزار Displacement (mbd) ، روی |
برای ترسیم سرعت زاویه ای سه غلتک، دستورالعمل های زیر را دنبال کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 3 مطابقت داشته باشد .
سرعت زاویه ای [غلتک]
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Angular Speed [Rollers] را در قسمت نوشتار برچسب تایپ کنید . |
3 | برای گسترش بخش عنوان کلیک کنید . از لیست نوع عنوان ، Label را انتخاب کنید . |
جهانی 1
1 | روی Angular Speed [Rollers] کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rd5.th_tx | راد/ثانیه | سرعت زاویه ای بدنه صلب، جزء x |
sqrt(mbd.rd22.th_tx^2+mbd.rd22.th_ty^2) | راد/ثانیه | سرعت زاویه ای جسم صلب |
mbd.rd43.th_ty | راد/ثانیه | سرعت زاویه ای جسم صلب، جزء y |
4 | برای گسترش بخش Legends کلیک کنید . از فهرست Legends ، Manual را انتخاب کنید . |
5 | در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
غلتک 1 |
غلتک 16 |
غلتک 30 |
سرعت زاویه ای [غلتک]
1 | در پنجره Model Builder ، روی Angular Speed [Rollers] کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | چک باکس x-axis label را انتخاب کنید . |
4 | کادر بررسی برچسب محور y را انتخاب کنید . |
5 | در قسمت متن مرتبط، سرعت زاویهای بدنه صلب (rad/s) را تایپ کنید . |
6 | در نوار ابزار Angular Speed [Rollers] ، روی |
برای ترسیم سرعت زاویه ای توپ، دستورالعمل های زیر را دنبال کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 4 مطابقت داشته باشد .
سرعت زاویه ای [توپ]
1 | روی Angular Speed [Rollers] کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Angular Speed [Ball] را در قسمت نوشتار Label تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Angular Speed [Ball] را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rd15.th_tx | راد/ثانیه | سرعت زاویه ای بدنه صلب، جزء x |
mbd.rd15.th_ty | راد/ثانیه | سرعت زاویه ای جسم صلب، جزء y |
mbd.rd15.th_tz | راد/ثانیه | سرعت زاویه ای بدنه صلب، جزء z |
4 | قسمت Legends را پیدا کنید . از لیست Legends ، Automatic را انتخاب کنید . |
5 | در نوار ابزار Angular Speed [Ball] ، روی |
برای ترسیم نیروی تماس و اصطکاک بین توپ و سه غلتک نمونه، دستورالعمل های زیر را دنبال کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 5 مطابقت داشته باشد .
نیروی تماس و اصطکاک [غلتک]
1 | در پنجره Model Builder ، روی Angular Speed [Ball] راست کلیک کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، نیروی تماس و اصطکاک [غلتک] را در قسمت نوشتار برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Contact & Friction Force [Rollers] را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 |
4 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rbc1.Fn | ن | نیروی تماس |
mbd.rbc1.FF | ن | نیروی اصطکاک |
mbd.rbc16.Fn | ن | نیروی تماس |
mbd.rbc16.ff | ن | نیروی اصطکاک |
mbd.rbc30.Fn | ن | نیروی تماس |
mbd.rbc30.ff | ن | نیروی اصطکاک |
5 | قسمت Legends را پیدا کنید . از فهرست Legends ، Manual را انتخاب کنید . |
6 | در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
نیروی تماس – غلتک 1 |
نیروی اصطکاک – غلتک 1 |
نیروی تماس – غلتک 16 |
نیروی اصطکاک – غلتک 16 |
نیروی تماس – غلتک 30 |
نیروی اصطکاک – غلتک 30 |
نیروی تماس و اصطکاک [غلتک]
1 | در پنجره Model Builder ، روی Contact & Friction Force [Rollers] کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | در قسمت متن برچسب محور y ، Force (N) را تایپ کنید . |
4 | در نوار ابزار Contact & Friction Force [Rollers] ، روی |
برای ترسیم نیروی تماس و اصطکاک بین توپ و چهار راهنما، دستورالعمل های زیر را دنبال کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 6 مطابقت داشته باشد .
نیروی تماس و اصطکاک [راهنماها]
1 | روی Contact & Friction Force [Rollers] کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، نیروی تماس و اصطکاک [راهنماها] را در قسمت نوشتار برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Contact & Friction Force [Guides] را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 |
4 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rbc33.Fn | ن | نیروی تماس |
mbd.rbc33.ff | ن | نیروی اصطکاک |
mbd.rbc35.Fn | ن | نیروی تماس |
mbd.rbc35.ff | ن | نیروی اصطکاک |
mbd.rbc39.Fn | ن | نیروی تماس |
mbd.rbc39.ff | ن | نیروی اصطکاک |
mbd.rbc40.Fn | ن | نیروی تماس |
mbd.rbc40.ff | ن | نیروی اصطکاک |
5 | قسمت Legends را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
نیروی تماس – راهنمای L3 |
نیروی اصطکاک – راهنمای L3 |
نیروی تماس – راهنمای L5 |
نیروی اصطکاک – راهنمای L5 |
نیروی تماس – راهنمای R4 |
نیروی اصطکاک – راهنمای R4 |
نیروی تماس – راهنمای R5 |
نیروی اصطکاک – راهنمای R5 |
نیروی تماس و اصطکاک [راهنماها]
1 | در پنجره Model Builder ، روی Contact & Friction Force [Guides] کلیک کنید . |
2 | در نوار ابزار Contact & Friction Force [Guides] ، روی |
دستورالعمل های زیر را برای ترسیم نیروی تماس و اصطکاک بین سطوح توپ و سینی دنبال کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 7 مطابقت داشته باشد .
نیروی تماس و اصطکاک [سینی]
1 | روی Contact & Friction Force [Guides] کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، نیروی تماس و اصطکاک [Tray] را در قسمت نوشتار برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Contact & Friction Force [Tray] را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 |
4 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rbc41.Fn | ن | نیروی تماس |
mbd.rbc41.ff | ن | نیروی اصطکاک |
mbd.rbc42.Fn | ن | نیروی تماس |
mbd.rbc42.ff | ن | نیروی اصطکاک |
5 | قسمت Legends را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
نیروی تماس – پایین سینی |
نیروی اصطکاک – کف سینی |
نیروی تماس – سمت سینی |
نیروی اصطکاک – سمت سینی |
نیروی تماس و اصطکاک [سینی]
1 | در پنجره Model Builder ، روی Contact & Friction Force [Tray] کلیک کنید . |
2 | در نوار ابزار Contact & Friction Force [Tray] ، روی |
دستورالعمل های زیر را دنبال کنید تا سرعت اتلاف انرژی اصطکاکی بین توپ و سه غلتک نمونه را ترسیم کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 8 مطابقت داشته باشد .
نرخ اتلاف انرژی اصطکاکی [غلتک]
1 | روی Contact & Friction Force [Tray] کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، نرخ اتلاف انرژی اصطکاکی [غلتک] را در قسمت نوشتار برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره نرخ اتلاف انرژی اصطکاکی [Rollers] را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 |
4 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rbc1.Qf | دبلیو | سرعت اتلاف انرژی اصطکاکی |
mbd.rbc16.Qf | دبلیو | سرعت اتلاف انرژی اصطکاکی |
mbd.rbc30.Qf | دبلیو | سرعت اتلاف انرژی اصطکاکی |
5 | قسمت Legends را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
غلتک 1 |
غلتک 16 |
غلتک 30 |
نرخ اتلاف انرژی اصطکاکی [غلتک]
1 | در پنجره Model Builder ، روی نرخ اتلاف انرژی اصطکاکی [غلتک ها] کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | کادر بررسی برچسب محور y را پاک کنید . |
4 | در نوار ابزار نرخ اتلاف انرژی اصطکاکی [غلتک ها] ، روی |
دستورالعمل های زیر را دنبال کنید تا سرعت اتلاف انرژی اصطکاکی بین توپ و چهار راهنمای جانبی نمونه را ترسیم کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 9 مطابقت داشته باشد .
نرخ اتلاف انرژی اصطکاکی [راهنماها]
1 | روی نرخ اتلاف انرژی اصطکاکی [غلتک ها] کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، نرخ اتلاف انرژی اصطکاکی [راهنماها] را در قسمت نوشتار برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره نرخ اتلاف انرژی اصطکاکی [Guides] را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 |
4 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rbc33.Qf | دبلیو | سرعت اتلاف انرژی اصطکاکی |
mbd.rbc35.Qf | دبلیو | سرعت اتلاف انرژی اصطکاکی |
mbd.rbc39.Qf | دبلیو | سرعت اتلاف انرژی اصطکاکی |
mbd.rbc40.Qf | دبلیو | سرعت اتلاف انرژی اصطکاکی |
5 | قسمت Legends را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
راهنمای L3 |
راهنمای L5 |
راهنمای R4 |
راهنمای R5 |
نرخ اتلاف انرژی اصطکاکی [راهنماها]
1 | در پنجره Model Builder ، روی نرخ اتلاف انرژی اصطکاکی [راهنماها] کلیک کنید . |
2 | در نوار ابزار نرخ اتلاف انرژی اصطکاکی [راهنماها] ، روی |
دستورالعمل های زیر را دنبال کنید تا سرعت اتلاف انرژی اصطکاکی بین توپ و سطوح سینی را ترسیم کنید. نمودار حاصل باید با نمودار نشان داده شده در شکل 10 مطابقت داشته باشد .
نرخ اتلاف انرژی اصطکاکی [سینی]
1 | روی نرخ اتلاف انرژی اصطکاکی [راهنماها] کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، نرخ اتلاف انرژی اصطکاکی [Tray] را در قسمت نوشتار برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره نرخ اتلاف انرژی اصطکاکی [Tray] را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 |
4 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.rbc41.Qf | دبلیو | سرعت اتلاف انرژی اصطکاکی |
mbd.rbc42.Qf | دبلیو | سرعت اتلاف انرژی اصطکاکی |
5 | قسمت Legends را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
پایین سینی |
سمت سینی |
نرخ اتلاف انرژی اصطکاکی [سینی]
1 | در پنجره Model Builder ، روی نرخ اتلاف انرژی اصطکاکی [Tray] کلیک کنید . |
2 | در نوار ابزار نرخ اتلاف انرژی اصطکاکی [Tray] ، روی |
جابجایی (mbd)
1 | در نوار ابزار نتایج ، روی |
2 | در پنجره تنظیمات برای انیمیشن ، Displacement (mbd) را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Frames را پیدا کنید . در قسمت متنی Number of frames عدد 100 را تایپ کنید . |



