
دینامیک دو پاندولی
معرفی
این مدل آموزشی مدلسازی یک آونگ دوتایی را با استفاده از رابط Multibody Dynamics در COMSOL Multiphysics نشان میدهد. مثال با ایجاد یک مفصل لولای ساده شروع می شود و سپس مدل را با چندین گره در دسترس برای اتصالات مانند محدودیت ها، قفل، فنر، دمپر، حرکت تجویز شده و اصطکاک گسترش می دهد.
تعریف مدل
این مدل حرکت یک آونگ دوتایی تحت گرانش را توصیف می کند. سیستم آونگ دوتایی که در شکل 1 نشان داده شده است برای زوایای چرخش کوچک به صورت خطی رفتار می کند، اما با افزایش زاویه چرخش بسیار غیرخطی می شود و در نهایت منجر به یک سیستم آشفته می شود.
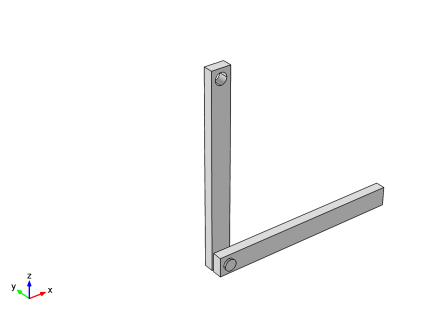
شکل 1: هندسه آونگ دوتایی.
در اینجا، بازوهای آونگ دوتایی از طریق یک مفصل لولا به هم متصل می شوند. یک مفصل لولا یک درجه آزادی چرخشی حول محور مفصل دارد. درجات آزادی باقیمانده هر دو جزء که مفصل را مشخص میکنند، محدود به داشتن مقادیر یکسان در مرکز مفصل هستند.
مثال کامل به شش قسمت تقسیم شده است تا عملکرد موجود بر روی گره مشترک و زیرگره های مرتبط را نشان دهد.
یک مطالعه جدید برای هر یک از موارد اضافه شده است تا وضوح بیشتری ارائه شود. این همچنین به ذخیره تمام تنظیمات مدل کمک می کند، که هنگام محاسبه مجدد راه حل در مدل حل شده مورد نیاز است.
موارد مختلف به شرح زیر است.
• | مورد- 1 : مفصل لولای پایه |
• | مورد -2 : محدودیت در مفصل |
• | مورد -3 : قفل کردن روی مفصل |
• | مورد -4 : فنر و دمپر روی اتصال |
• | مورد 5 : حرکت تجویز شده روی مفصل |
• | مورد- 6 : اصطکاک روی مفصل |
جزئیات هر مورد به همراه نتایج و دستورالعمل های مدل سازی در قسمت بعدی این سند آورده شده است.
نکاتی درباره پیاده سازی COMSOL
• | برای سه حالت اول، هر دو بازو با استفاده از مدل Linear Elastic Material به عنوان عناصر انعطافپذیر مدلسازی میشوند و در سه مورد آخر با استفاده از مدل مواد صلب به عنوان عناصر صلب مدلسازی میشوند. در صورتی که تنش ها و تغییر شکل اجزاء مورد توجه نباشد، می توان از عناصر صلب استفاده کرد. |
• | یک گره مشترک می تواند مستقیماً بین گره های مواد صلب ارتباط برقرار کند . با این حال، در عناصر انعطاف پذیر، گره های پیوست برای تعیین مرزهای اتصال مورد نیاز هستند. |
• | شرایط مرزی محدودیت، مانند اتصال صلب و محدودیت ثابت ، نمی توانند با گره مواد صلب استفاده شوند . از این رو، گره جابجایی/چرخش تجویز شده (زیرگره مواد صلب ) برای تجویز درجات آزادی استفاده می شود. |
مسیر کتابخانه برنامه: Multibody_Dynamics_Module/Tutorials/double_pendulum
تعریف مدل: Case-1 (مفصل اصلی لولا)
سطح بالایی بازو به گونه ای محدود شده است که نمی تواند ترجمه شود، اما می تواند حول محور y بچرخد . کل سیستم در میدان گرانشی قرار می گیرد تا دینامیک سیستم را تحلیل کند.
در این حالت، بازوهای آونگ به عنوان عناصر انعطاف پذیر مدل می شوند. از این رو، تنش های ایجاد شده در اجزا را می توان در حین محاسبه دینامیک سیستم ارزیابی کرد.
نتایج و بحث
شکل 2 و شکل 3 چرخش نسبی بین بازوها و نیروهای واکنش در مفصل لولا را در طول نوسان آونگ دوتایی نشان می دهد. اجزای x و z نیروهای واکنش، بار گرانشی را در بازو پایینی متعادل میکنند، همانطور که آونگ در صفحه xz نوسان میکند .
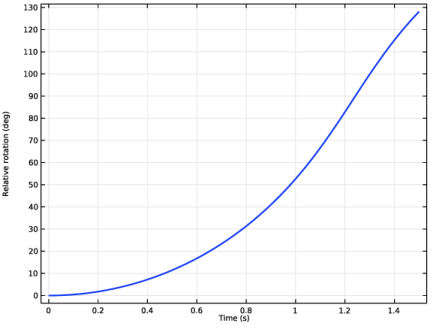
شکل 2: چرخش نسبی بازوها در مفصل لولا (مورد-1).
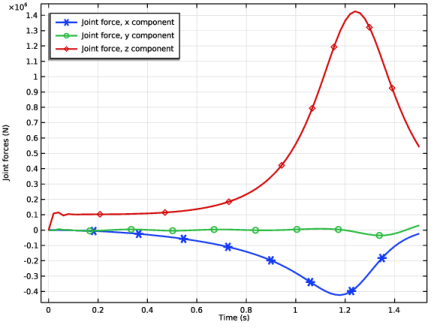
شکل 3: نیروهای واکنش در مفصل لولا (مورد-1).
تعریف مدل: مورد-2 (محدودیت های مفصل)
سطح بالایی بازو ثابت است. یک محدودیت در چرخش نسبی 45 درجه بین هر دو بازو اضافه می شود. کل سیستم در میدان گرانشی قرار می گیرد و دینامیک آن تحلیل می شود.
هر دو بازو به عنوان قطعات انعطاف پذیر مدل شده اند. تغییر شکل، و همچنین تنش های ایجاد شده در اجزاء، در طول و پس از فعال شدن شرایط محدودیت قابل توجه است.
نتایج و بحث
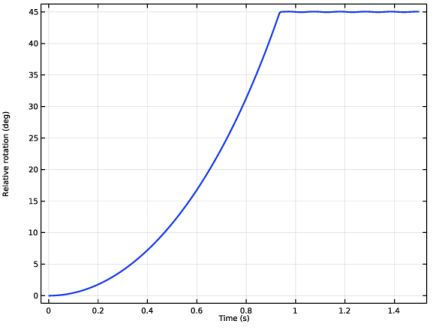
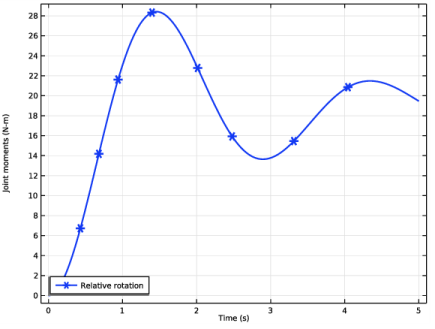
چرخش نسبی بین بازوها، هنگامی که یک محدودیت به مفصل اضافه می شود، در شکل 4 نشان داده شده است . در این حالت، چرخش نسبی ابتدا به دلیل نیروی گرانش افزایش می یابد. سپس پس از رسیدن به حداکثر حد محدود، با برگشت بازو پایین، کاهش می یابد. چرخش نسبی برای مدت معینی در حداکثر حد خود باقی می ماند. این به دلیل خم شدن بازوهای منعطف به دلیل ممان اینرسی زیاد و اعمال ناگهانی شرایط محدودیت اتفاق میافتد.
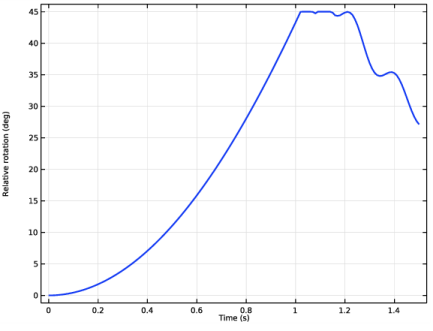
شکل 4: چرخش نسبی بازوها در مفصل لولا (مورد-2).
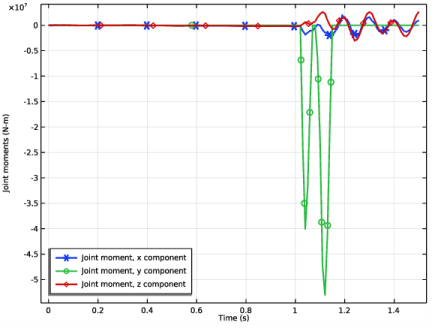
شکل 5: لحظه های واکنش در مفصل لولا (مورد-2).
شکل 5 لحظه های واکنش در محل اتصال را هنگام استفاده از یک شرط محدودیت نشان می دهد. اتصال به بازوها اجازه می دهد تا حول محور y بچرخند ، بنابراین گشتاور واکنش باید در این جهت صفر باشد. با این حال، زمانی که شرط محدودیت فعال است، همان مفصل این حرکت را محدود می کند و از این رو، یک لحظه واکنش بالا در جهت y دیده می شود. پس از اینکه شرط محدودیت حرکت نسبی را متوقف کرد، آونگ به دلیل هندسه نامتقارن خود سعی می کند حول دو محور دیگر بچرخد. بنابراین گشتاورهای غیر صفر در این جهات نیز قابل مشاهده است.
شکل 6 تغییرات اشکال مختلف انرژی در سیستم را هنگام استفاده از یک شرط محدودیت نشان می دهد. قبل از فعال شدن شرایط محدودیت، انرژی پتانسیل به انرژی جنبشی تبدیل می شود و انرژی کرنش ناچیز است. در طول دوره ای که شرط محدودیت فعال است، سرعت نسبی قبل از تغییر علامت به صفر می رسد. در این دوره تمام انرژی جنبشی به انرژی کرنشی تبدیل می شود. هنگامی که شرایط محدودیت دیگر عمل نمی کند، انرژی کرنش دوباره به انرژی جنبشی تبدیل می شود. امواج ساختاری به دلیل ماهیت انعطاف پذیر در اجزاء باقی می مانند، بنابراین انرژی کرنشی غیر صفر قابل مشاهده است.
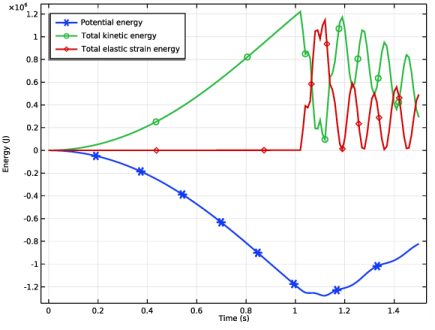
شکل 6: تغییرات زمانی اشکال مختلف انرژی در مورد-2.
تعریف مدل: Case-3 (قفل کردن روی مفصل)
سطح بالایی بازو به گونهای محدود شده است که نمیتواند ترجمه شود، اما آزادانه میتواند حول محور y بچرخد . یک حالت قفل در چرخش نسبی 45 درجه بین هر دو بازوی آونگ اضافه می شود. کل سیستم در میدان گرانشی قرار می گیرد و دینامیک سیستم مورد تجزیه و تحلیل قرار می گیرد. هر دو بازوی آونگ به عنوان عناصر انعطاف پذیر مدل سازی شده اند.
نتایج و بحث
شکل 7 چرخش نسبی بین بازوها را هنگامی که یک قفل در مفصل وجود دارد نشان می دهد. در این حالت، چرخش نسبی ابتدا به دلیل نیروی گرانشی افزایش می یابد و سپس در حداکثر حد محدود قفل می شود. هنگامی که چرخش نسبی به موقعیت قفل می رسد، سرعت نسبی برای بقیه شبیه سازی به صفر می رسد.
شکل 7: چرخش نسبی بازوها در مفصل لولا (مورد-3).
شکل 8 لحظات واکنش را در محل اتصال زمانی که از شرایط قفل استفاده می شود نشان می دهد. اتصال در ابتدا به بازوها اجازه می دهد تا نسبت به یکدیگر حول محور y بچرخند به طوری که گشتاور واکنش باید در این جهت صفر باشد. با این حال، پس از اعمال شرط قفل، همان مفصل این حرکت را محدود می کند تا یک لحظه واکنش بالا در جهت y دیده شود. پس از فعال شدن حالت قفل، آونگ نیز به دلیل هندسه نامتقارن خود سعی می کند حول دو محور دیگر بچرخد. بنابراین گشتاورهای غیر صفر در این جهات نیز قابل مشاهده است.
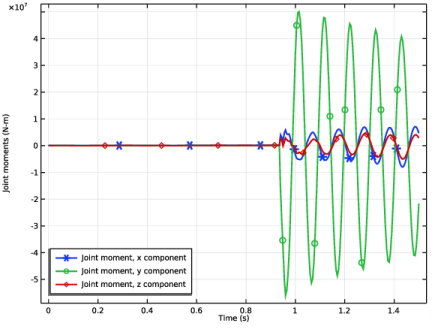
شکل 8: لحظه های واکنش در مفصل لولا (مورد-3).
تعریف مدل: Case-4 (فنر و دمپر روی مفصل)
در این حالت، هر دو بازوی آونگ به عنوان عناصر صلب مدلسازی میشوند. بالای بازو ثابت است. یک فنر پیچشی و دمپر در چرخش نسبی بین بازوها اضافه می شود. ثابت فنر و ضریب میرایی به ترتیب 5e6 N-m و 1e6 Nms هستند. دینامیک سیستم تحت بار گرانشی تجزیه و تحلیل می شود.
نتایج و بحث
شکل 9 چرخش نسبی بین بازوها را هنگام افزودن فنر و دمپر به مفصل نشان می دهد. در این حالت فنر پیچشی سعی می کند حرکت نسبی در محل اتصال را محدود کرده و لحظه ای را که ناشی از بار ثقلی است متعادل کند. بدون دمپر بازوها حول موقعیت تعادل نوسان می کنند. در اینجا یک دمپر به مفصل اضافه می شود، به طوری که نوسان در چرخش نسبی کاهش می یابد و بازوها به حالت تعادل تمایل دارند.
شکل 9: چرخش نسبی بازوها در مفصل لولا (مورد-4).
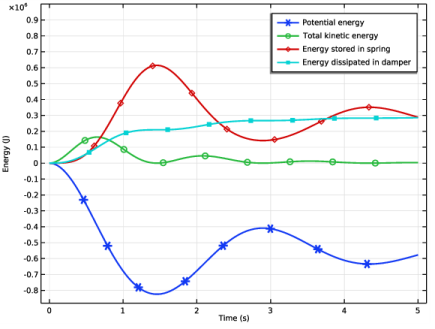
شکل 10: تغییرات زمانی اشکال مختلف انرژی (مورد-4).
شکل 10 تغییرات اشکال مختلف انرژی در سیستم را هنگام افزودن فنر و دمپر به اتصال نشان می دهد. در ابتدا انرژی پتانسیل به انرژی جنبشی تبدیل می شود. پس از مدتی، اثرات فنر و دمپر غالب خواهند شد. دمپر انرژی را هدر می دهد و بنابراین انرژی جنبشی تقریباً به صفر می رسد. از آنجایی که انرژی تلف شده در دمپر متناسب با سرعت است، به یک مقدار ثابت تمایل دارد. انرژی ذخیره شده در فنر به آرامی به انرژی پتانسیل تبدیل می شود و بالعکس.
تعریف مدل: Case-5 (حرکت تجویز شده روی مفصل)
مانند مورد قبلی، بازوهای آونگ به عنوان عناصر صلب مدلسازی میشوند. بالای بازو ثابت است. سرعت زاویه ای نسبی بین هر دو بازو برای مدت معینی تجویز می شود و پس از آن هر درجه آزادی مشترک آزاد می شود. سرعت زاویه ای تجویز شده تابعی خطی از زمان ( t rad/s) است و در 1 ثانیه به حداکثر مقدار خود 1 rad/s می رسد .
نتایج و بحث
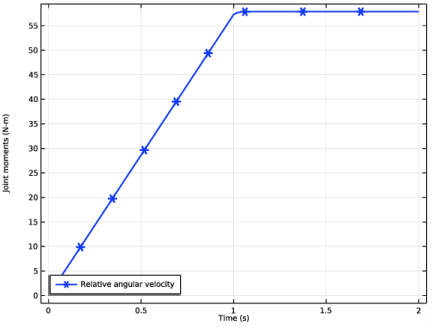
شکل 11: سرعت زاویه ای نسبی بازوها در مفصل لولا (مورد-5).
شکل 11 سرعت زاویه ای نسبی بین بازوها را هنگام تجویز برای مدت زمان معین نشان می دهد. سرعت تا 1 ثانیه تجویز می شود و از این رو، در این بازه زمانی به حداکثر مقدار خود افزایش می یابد. پس از آن، به دلیل اینرسی اجزا و بدون هیچ تلفاتی، سرعت تا حداکثر مقدار برای بقیه شبیه سازی حفظ می شود. چرخش نسبی بین بازوها در شکل 12 نشان داده شده است . از این نمودار مشخص است که قبل از 1 ثانیه، چرخش با زمان به صورت درجه دوم افزایش می یابد و پس از آن زمان به صورت خطی افزایش می یابد.
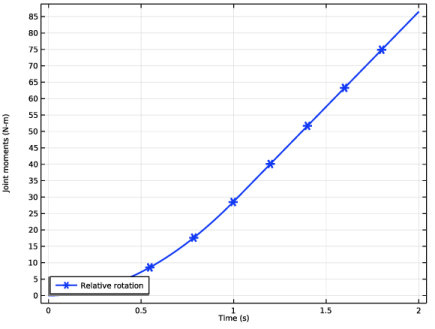
شکل 12: چرخش نسبی بازوها در مفصل لولا (مورد-5).
تعریف مدل: Case-6 (اصطکاک روی مفصل)
مانند مورد قبلی، بازوهای آونگ به عنوان بدنه های صلب مدل می شوند. بالای بازو ثابت است. دینامیک سیستم تحت بار ثقلی و با تلفات اصطکاکی در اتصال تجزیه و تحلیل می شود. گشتاور اصطکاک مؤثر با استفاده از نیروهای وارد بر یک مفصل محاسبه می شود و بر روی چرخش نسبی بین بازوها اعمال می شود.
نتایج و بحث
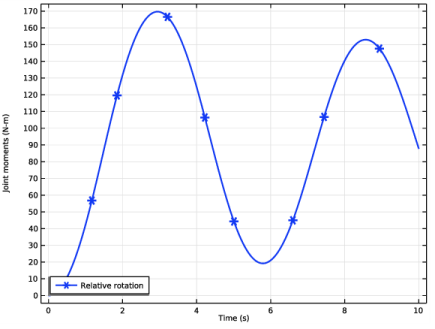
شکل 13: چرخش نسبی بازوها در مفصل لولا (مورد-6).
شکل 13 چرخش نسبی بین بازوها را نشان می دهد. پوسیدگی در بزرگی چرخش نسبی به دلیل تلفات اصطکاکی در مفصل لولا، قابل مشاهده است.
تغییرات زمانی لحظه اصطکاک در شکل 14 نشان داده شده است . مقدار متوسط لنگر اصطکاکی توسط بار ثقلی اعمال شده بر روی هر دو بازو کنترل می شود و نوسانات لنگر اصطکاکی توسط نیروهای اینرسی در هر دو بازو کنترل می شود. هنگامی که جهت حرکت معکوس می شود، یک تغییر سریع در لحظه اصطکاک مشاهده می شود. این رفتار قانون اصطکاک کولن را تقلید می کند، اما لحظه اصطکاک کاملاً ناپیوسته نیست، همانطور که در قانون اصطکاک کولن وجود دارد.
شکل 15 تغییرات اشکال مختلف انرژی در سیستم را نشان می دهد که تلفات اصطکاکی به اتصال اضافه می شود. افزایش تلفات انرژی اصطکاکی را می توان در طرح مشاهده کرد.
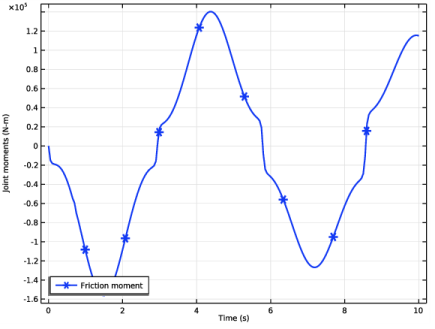
شکل 14: مشخصات لنگر اصطکاک در مفصل لولا (مورد-6).
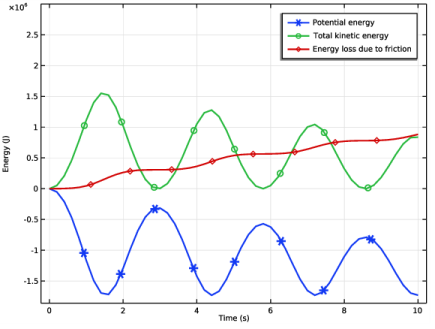
شکل 15: تغییرات زمانی اشکال مختلف انرژی (مورد-6).
دستورالعمل های مدل سازی (مفصل پایه لولا)
از منوی File ، New را انتخاب کنید .
جدید
در پنجره جدید ، روی  Model Wizard کلیک کنید .
Model Wizard کلیک کنید .
مدل جادوگر
1 | در پنجره Model Wizard ، روی |
2 | در درخت Select Physics ، Structural Mechanics>Multibody Dynamics (mbd) را انتخاب کنید . |
3 | روی افزودن کلیک کنید . |
4 |
5 | در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
6 |
هندسه 1
اگر نمی خواهید هندسه را گام به گام بسازید، می توانید آن را از مدل ذخیره شده بارگیری کنید: در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Geometry 1 راست کلیک کرده و Insert Sequence را انتخاب کنید . به پوشه Application Libraries مدل بروید و روی فایل double_pendulum.mph دوبار کلیک کنید . سپس می توانید به بخش تعاریف زیر بروید.
برای ساختن هندسه از ابتدا، اینجا را ادامه دهید.
بلوک 1 (blk1)
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای Block ، قسمت Size and Shape را پیدا کنید . |
3 | در قسمت Depth text 0.5 را تایپ کنید . |
4 | در قسمت متن ارتفاع ، 10 را تایپ کنید . |
سیلندر 1 (cyl1)
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات سیلندر ، بخش اندازه و شکل را پیدا کنید . |
3 | در قسمت متن Radius ، 0.3 را تایپ کنید . |
4 | در قسمت متن ارتفاع ، 0.5 را تایپ کنید . |
5 | قسمت Position را پیدا کنید . در قسمت متن x ، 0.5 را تایپ کنید . |
6 | در قسمت متن z ، 9.5 را تایپ کنید . |
7 | قسمت Axis را پیدا کنید . از لیست نوع محور ، محور y را انتخاب کنید . |
تفاوت 1 (dif1)
1 | در نوار ابزار Geometry ، روی |
2 | فقط شی blk1 را انتخاب کنید. |
3 | در پنجره تنظیمات برای تفاوت ، بخش تفاوت را پیدا کنید . |
4 | زیربخش اشیاء را برای تفریق پیدا کنید . برای انتخاب دکمه ضامن |
5 | فقط شی cyl1 را انتخاب کنید. |
سیلندر 2 (cyl2)
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات سیلندر ، بخش اندازه و شکل را پیدا کنید . |
3 | در قسمت متن Radius ، 0.3 را تایپ کنید . |
4 | در قسمت متن ارتفاع ، 1.25 را تایپ کنید . |
5 | قسمت Position را پیدا کنید . در قسمت متن x ، 0.5 را تایپ کنید . |
6 | در قسمت متن y ، -0.75 را تایپ کنید . |
7 | در قسمت متن z ، 0.5 را تایپ کنید . |
8 | قسمت Axis را پیدا کنید . از لیست نوع محور ، محور y را انتخاب کنید . |
کپی 1 (کپی1)
1 | در نوار ابزار Geometry ، روی |
2 | فقط شی cyl2 را انتخاب کنید. |
بلوک 2 (بلک2)
1 | در نوار ابزار Geometry ، روی |
2 | در پنجره تنظیمات برای Block ، قسمت Size and Shape را پیدا کنید . |
3 | در قسمت متن Width عدد 10 را تایپ کنید . |
4 | در قسمت Depth text 0.5 را تایپ کنید . |
5 | قسمت Position را پیدا کنید . در قسمت متن y ، -0.625 را تایپ کنید . |
تفاوت 2 (dif2)
1 | در نوار ابزار Geometry ، روی |
2 | فقط شی blk2 را انتخاب کنید. |
3 | در پنجره تنظیمات برای تفاوت ، بخش تفاوت را پیدا کنید . |
4 | زیربخش اشیاء را برای تفریق پیدا کنید . برای انتخاب دکمه ضامن |
5 | فقط شیء copy1 را انتخاب کنید. |
اتحادیه 1 (uni1)
1 | در نوار ابزار Geometry ، روی |
2 | فقط اشیاء cyl2 و dif1 را انتخاب کنید. |
3 | در پنجره تنظیمات برای Union ، بخش Union را پیدا کنید . |
4 | کادر تیک Keep interior borders را پاک کنید . |
فرم اتحادیه (فین)
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Form Union (fin) کلیک کنید . |
2 | در پنجره تنظیمات Form Union/Assembly ، بخش Form Union/Assembly را پیدا کنید . |
3 | از لیست Action ، Form an assembly را انتخاب کنید . |
4 |
تعاریف
ادغام 1 (در اول)
1 | در نوار ابزار تعاریف ، روی |
2 | در پنجره Graphics کلیک کنید و سپس Ctrl+A را فشار دهید تا هر دو دامنه انتخاب شوند. |
متغیرهای 1
1 | در نوار ابزار تعاریف ، روی متغیرهای |
2 | در پنجره تنظیمات برای متغیرها ، بخش متغیرها را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
نام | اصطلاح | واحد | شرح |
Wp | intop1(mbd.rho*g_const*w) | جی | انرژی پتانسیل |
مواد را اضافه کنید
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Material بروید . |
3 | در درخت، Built-in>Structural steel را انتخاب کنید . |
4 | روی Add to Component در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
MULTIBODY DYNAMICS (MBD)
جاذبه 1
در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Multibody Dynamics (mbd) راست کلیک کرده و Gravity را انتخاب کنید .
پیوست 1
1 | در نوار ابزار Physics ، روی |
2 | فقط مرزهای 19، 20، 24 و 25 را انتخاب کنید. |
مفصل لولا 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت انتخاب پیوست را پیدا کنید . |
3 | از لیست منبع ، ثابت را انتخاب کنید . |
4 | از لیست مقصد ، پیوست 1 را انتخاب کنید . |
5 | قسمت Axis of Joint را پیدا کنید . بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
1 | y |
0 | z |
6 | قسمت نیروهای مشترک و لحظات را پیدا کنید . از لیست، محاسبه نشود را انتخاب کنید . |
به عنوان اولین پیوست، مرزهای سیلندر بیرون زده را انتخاب کنید.
پیوست 2
1 | در نوار ابزار Physics ، روی |
2 | فقط مرزهای 16، 17، 22 و 23 را انتخاب کنید. |
به عنوان پیوست دوم، مرزهای داخلی سوراخ در نوار بیرونی را انتخاب کنید.
پیوست 3
1 | در نوار ابزار Physics ، روی |
2 | فقط مرزهای 6-9 را انتخاب کنید. |
مفصل لولا 2
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت انتخاب پیوست را پیدا کنید . |
3 | از فهرست منبع ، پیوست 2 را انتخاب کنید . |
4 | از لیست مقصد ، پیوست 3 را انتخاب کنید . |
5 | قسمت Axis of Joint را پیدا کنید . بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
1 | y |
0 | z |
مطالعه 1
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در بخش مطالعه 1 ، روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
3 | در قسمت متنی زمان خروجی ، range(0,0.02,1.5) را تایپ کنید . |
4 | در پنجره Model Builder ، روی Study 1 کلیک کنید . |
5 | در پنجره تنظیمات برای مطالعه ، Study: Basic را در قسمت نوشتار Label تایپ کنید . |
6 | در نوار ابزار صفحه اصلی ، |
نتایج
جابجایی (mbd)
دو نمودار پیش فرض تغییر مکان و مشخصات سرعت را در بازوهای آونگ دوتایی نشان می دهد. تنش ها را نیز می توان با تغییر بیان در طرح اول مشاهده کرد.
مسیرهای نقطه ای را در نمودار جابجایی اضافه کنید تا جهت حرکت هر بازو را تجسم کنید.
مسیرهای نقطه 1
1 | در نوار ابزار Displacement (mbd) ، روی |
2 | فقط نقاط 14 و 21 را انتخاب کنید. |
3 | در پنجره تنظیمات برای مسیرهای نقطه ، قسمت Coloring and Style را پیدا کنید . |
4 | زیربخش Line style را پیدا کنید . از لیست نوع ، لوله را انتخاب کنید . |
بیان رنگ 1
1 | روی Point Trajectories 1 کلیک راست کرده و Color Expression را انتخاب کنید . |
2 | در پنجره تنظیمات برای Color Expression ، بخش Expression را پیدا کنید . |
3 | در قسمت Expression text، t را تایپ کنید . |
4 | قسمت Coloring and Style را پیدا کنید . تیک Color legend را پاک کنید . |
5 |
از دستورالعمل های زیر برای بازتولید شکل 2 استفاده کنید :
چرخش نسبی
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، چرخش نسبی را در قسمت نوشتار برچسب تایپ کنید . |
جهانی 1
1 | روی Relative rotation کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint 2>mbd.hgj2.th – Relative rotation – rad را انتخاب کنید . |
3 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.hgj2.th | درجه | چرخش نسبی |
4 | برای گسترش بخش عنوان کلیک کنید . از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
5 | برای گسترش بخش Legends کلیک کنید . تیک Show legends را پاک کنید . |
6 | برای گسترش بخش Coloring and Style کلیک کنید . از لیست Width ، 2 را انتخاب کنید . |
7 | در نوار ابزار چرخش نسبی ، روی |
برای ایجاد نمودار نیروهای مشترک ارائه شده در شکل 3 ، دستورالعمل های زیر را دنبال کنید:
نیروهای مشترک
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، نیروهای مشترک را در قسمت متن برچسب تایپ کنید . |
جهانی 1
1 | روی Joint force کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint 2>Joint force – N>mbd.hgj2.Fx – Joint force, x component را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint 2>Joint force – N>mbd.hgj2.Fy – Joint force, y component را انتخاب کنید . |
4 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint 2>Joint force – N>mbd.hgj2.Fz – Joint force, z component را انتخاب کنید . |
5 | قسمت عنوان را پیدا کنید . از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
6 | قسمت Coloring and Style را پیدا کنید . از لیست Width ، 2 را انتخاب کنید . |
7 | زیربخش نشانگرهای خط را پیدا کنید . از لیست نشانگر ، چرخه را انتخاب کنید . |
8 | از لیست موقعیت یابی ، Interpolated را انتخاب کنید . |
نیروهای مشترک
1 | در پنجره Model Builder ، روی Joint force کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | کادر بررسی برچسب محور y را انتخاب کنید . در قسمت متن مرتبط، Joint force (N) را تایپ کنید . |
4 | قسمت Legend را پیدا کنید . از لیست موقعیت ، سمت چپ بالا را انتخاب کنید . |
5 | در نوار ابزار نیروهای مشترک ، روی |
نیروهای مشترک در سیستم مختصات محلی مفصل را نیز می توان با انجام مراحل مشابه ترسیم کرد.
دستورالعمل های مدل سازی (محدودیت های مفصل)
همان مفصل لولا برای سه مورد اول با کنترل زیرگره های آن در گره مطالعه استفاده می شود. مرکز و محور مفصل با تکنیک های مختلف محاسبه می شود. این برای نشان دادن انواع مختلف تکنیک های موجود است که در آن هر یک می تواند در موارد خاصی مفید باشد.
MULTIBODY DYNAMICS (MBD)
مفصل لولا 2
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Hinge Joint 2 کلیک کنید . |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت مرکز اتصال را پیدا کنید . |
3 | از لیست، User defined را انتخاب کنید . |
4 | بردار X c را به صورت مشخص کنید |
0.5 | ایکس |
0 | y |
0.5 | z |
5 | قسمت Axis of Joint را پیدا کنید . از لیست، از سیستم مختصات انتخاب شده را انتخاب کنید . |
6 | از لیست Axis to use ، 2 را انتخاب کنید . |
محدودیت 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای محدودیتها ، قسمت Rotational Constraints را پیدا کنید . |
3 | در قسمت مکس θ ، pi/4 را تایپ کنید . |
حرکت نسبی بین مبدا و مقصد در اولین مفصل لولا باید روی صفر تنظیم شود.
مفصل لولا 1
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی لولا Joint 1 کلیک کنید .
حرکت تجویز شده 1
در نوار ابزار Physics ، روی Attributes کلیک کنید و Prescribed Motion را انتخاب کنید .
اضافه کردن مطالعه
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Study بروید . |
3 | زیربخش مطالعات را پیدا کنید . در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
4 | روی Add Study در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
مطالعه 2
مرحله 1: وابسته به زمان
1 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
2 | در قسمت متن زمان خروجی ، range(0,0.01,1.5) را تایپ کنید . |
3 | در پنجره Model Builder ، روی Study 2 کلیک کنید . |
4 | در پنجره تنظیمات برای مطالعه ، Study: Constraints را در قسمت نوشتار Label تایپ کنید . |
5 | بخش تنظیمات مطالعه را پیدا کنید . تیک Generate defaults defaults را پاک کنید . |
6 | در نوار ابزار صفحه اصلی ، |
نمودارهای تولید شده در حالت اول را برای بازتولید نتایج نشان داده شده در شکل 4 و شکل 5 کپی کنید :
نتایج
چرخش نسبی: محدودیت ها
1 | در پنجره Model Builder ، روی Relative rotation کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، چرخش نسبی: محدودیت ها را در قسمت نوشتار برچسب تایپ کنید. |
3 | قسمت Data را پیدا کنید . از لیست Dataset ، Study: Constraints/Solution 2 (sol2) را انتخاب کنید . |
4 | در نوار ابزار چرخش نسبی: محدودیت ها ، روی |
لحظات مشترک: محدودیت ها
1 | در پنجره Model Builder ، روی Joint force کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Joint moments: Constraints را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Data را پیدا کنید . از لیست Dataset ، Study: Constraints/Solution 2 (sol2) را انتخاب کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Joint moments: Constraints را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint 2> Joint Joint – N ·m>mbd.hgj2.Mx – Joint moment, x component را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joints>Hinge Joint 2>Joint moment – N·m>mbd.hgj2.My – Joint moment، y جزء را انتخاب کنید . |
4 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint 2>Joint moment – N·m>mbd.hgj2.Mz – Joint moment، z component را انتخاب کنید . |
لحظات مشترک: محدودیت ها
1 | در پنجره Model Builder ، روی Joint moments: Constraints کلیک کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، قسمت Legend را پیدا کنید . |
3 | از لیست موقعیت ، پایین سمت چپ را انتخاب کنید . |
4 | قسمت Plot Settings را پیدا کنید . در قسمت نوشتاری برچسب محور y ، Joint moments (Nm) را تایپ کنید . |
5 | در نوار ابزار Joint moments: Constraints ، روی |
این دستورالعمل ها را برای بازتولید نمودار انرژی نشان داده شده در شکل 6 دنبال کنید :
انرژی: محدودیت ها
1 | روی Joint moments: Constraints کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، انرژی: محدودیت ها را در قسمت متن برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Energy: Constraints را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Definitions>Variables>Wp – Potential Energy – J را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Global>mbd.Wk_tot – Total kinetic Energy – J را انتخاب کنید . |
4 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Global>mbd.Ws_tot – Total elastic strain energy – J را انتخاب کنید . |
انرژی: محدودیت ها
1 | در پنجره Model Builder ، روی Energy: Constraints کلیک کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، قسمت Legend را پیدا کنید . |
3 | از لیست موقعیت ، سمت چپ بالا را انتخاب کنید . |
4 | قسمت Plot Settings را پیدا کنید . در قسمت نوشتاری برچسب محور y ، Energy (J) را تایپ کنید . |
5 | در نوار ابزار Energy: Constraints ، روی |
دستورالعمل مدلسازی (قفل کردن روی مفصل)
MULTIBODY DYNAMICS (MBD)
مفصل لولا 2
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Hinge Joint 2 کلیک کنید . |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، بخش Axis of Joint را پیدا کنید . |
3 | از لیست، انتخاب یک لبه موازی را انتخاب کنید . |
محور مشترک 1
1 | در پنجره Model Builder ، روی Joint Axis 1 کلیک کنید . |
2 | فقط Edge 33 را انتخاب کنید. |
مفصل لولا 2
1 | در پنجره Model Builder ، روی Hinge Joint 2 کلیک کنید . |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت مرکز اتصال را پیدا کنید . |
3 | از لیست، Centroid موجودیت های انتخاب شده را انتخاب کنید . |
4 | از لیست Entity level ، Edge را انتخاب کنید . |
مرکز مفصل: لبه 1
1 | در پنجره Model Builder ، روی Center of Joint: Edge 1 کلیک کنید . |
2 | فقط لبه های 34، 35، 46 و 48 را انتخاب کنید. |
مفصل لولا 2
در پنجره Model Builder ، روی Hinge Joint 2 کلیک کنید .
قفل کردن 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای قفل کردن ، قسمت قفل چرخشی را پیدا کنید . |
3 | در قسمت مکس θ ، pi/4 را تایپ کنید . |
اضافه کردن مطالعه
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Study بروید . |
3 | زیربخش مطالعات را پیدا کنید . در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
4 | روی Add Study در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
مطالعه 3
مرحله 1: وابسته به زمان
1 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
2 | در قسمت متنی زمان خروجی ، range(0,0.005,1.5) را تایپ کنید . |
3 | قسمت Physics and Variables Selection را پیدا کنید . تیک Modify model configuration for study step را انتخاب کنید . |
4 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd)، Frame Spatial Controls>Hinge Joint 1> Prescribed Motion 1 and Component 1 (comp1)>Multibody Dynamics (mbd)، Controls Spatial Frame>Hinge Joint 2>Constraints را انتخاب کنید. 1 . |
5 | کلیک راست کرده و Disable را انتخاب کنید . |
6 | در پنجره Model Builder ، روی Study 3 کلیک کنید . |
7 | در پنجره تنظیمات برای مطالعه ، Study: Locking را در قسمت نوشتار Label تایپ کنید . |
8 | بخش تنظیمات مطالعه را پیدا کنید . تیک Generate defaults defaults را پاک کنید . |
راه حل 3 (sol3)
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره Model Builder ، گره Solution 3 (sol3) را گسترش دهید ، سپس روی Time-Dependent Solver 1 کلیک کنید . |
3 | در پنجره تنظیمات برای حل وابسته به زمان ، برای گسترش بخش Time Steping کلیک کنید . |
4 | از لیست مراحل انجام شده توسط حل کننده ، Intermediate را انتخاب کنید . |
5 | در پنجره Model Builder ، گره Study: Locking>Solver Configurations>Solution 3 (sol3)>Time-Dependent Solver 1 را گسترش دهید ، سپس روی Fully Coupled 1 کلیک کنید . |
6 | در پنجره Settings for Fully Coupled ، برای گسترش بخش Method and Termination کلیک کنید . |
7 | از لیست روش غیر خطی ، خودکار (نیوتن) را انتخاب کنید . |
8 | در نوار ابزار مطالعه ، |
برای ایجاد نمودار چرخش نسبی نشان داده شده در شکل 7 ، دستورالعمل زیر را دنبال کنید:
نتایج
چرخش نسبی: قفل شدن
1 | در پنجره Model Builder ، روی Relative rotation کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره Settings for 1D Plot Group ، Relative rotation: Locking را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Data را پیدا کنید . از لیست مجموعه داده ، مطالعه: قفل/راه حل 3 (sol3) را انتخاب کنید . |
4 | در نوار ابزار چرخش نسبی: قفل ، روی |
برای ایجاد نمودار برای ممان های اتصال نشان داده شده در شکل 8 ، دستورالعمل های زیر را دنبال کنید:
لحظات مشترک: قفل شدن
1 | در پنجره Model Builder ، روی Joint moments: Constraints راست کلیک کرده و Duplicate را انتخاب کنید . |
2 | در پنجره Settings for 1D Plot Group ، Joint moments: Locking را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Data را پیدا کنید . از لیست مجموعه داده ، مطالعه: قفل/راه حل 3 (sol3) را انتخاب کنید . |
4 | در نوار ابزار Joint moments: Locking ، روی |
دستورالعمل مدلسازی (فنر و دمپر روی مفصل)
اتصال لولای مورد استفاده در موارد قبلی می تواند در اینجا برای تعریف اتصال بین اجزای صلب استفاده شود. با این حال، یک مفصل لولای جدید ایجاد شده است تا به راحتی بتوان هر مطالعه را به طور مستقل بدون تغییر انتخاب پیوست در مفصل لولا اجرا کرد.
MULTIBODY DYNAMICS (MBD)
مواد سفت و سخت 1
1 | در نوار ابزار Physics ، روی |
2 | فقط دامنه 2 را انتخاب کنید. |
از زیرگره مواد صلب برای تجویز یا محدود کردن حرکت آن استفاده کنید .
محدودیت ثابت 1
در نوار ابزار Physics ، روی Attributes کلیک کنید و Fixed Constraint را انتخاب کنید .
مواد سفت و سخت 2
1 | در نوار ابزار Physics ، روی |
2 | فقط دامنه 1 را انتخاب کنید. |
مفصل لولا 3
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت انتخاب پیوست را پیدا کنید . |
3 | از فهرست منبع ، Rigid Material 1 را انتخاب کنید . |
4 | از لیست مقصد ، Rigid Material 2 را انتخاب کنید . |
5 | قسمت Center of Joint را پیدا کنید . از لیست، User defined را انتخاب کنید . |
6 | بردار X c را به صورت مشخص کنید |
0.5 | ایکس |
0 | y |
0.5 | z |
7 | قسمت Axis of Joint را پیدا کنید . بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
1 | y |
0 | z |
فنر و دمپر 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای فنر و دمپر ، بخش Spring and Damper: Rotational را پیدا کنید . |
3 | در قسمت متن k θ ، 5e6 را تایپ کنید . |
4 | در قسمت متن c θ ، 1e6 را تایپ کنید . |
برای محاسبه انرژی تلف شده در دمپر یک ODE اضافه کنید.
5 |
6 | در کادر محاورهای Show More Options ، در درخت، کادر را برای گره Physics>Equation-Based Contributions انتخاب کنید . |
7 | روی OK کلیک کنید . |
انرژی: دمپر
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای معادلات جهانی ، انرژی: دمپر را در قسمت متن برچسب تایپ کنید . |
3 | قسمت معادلات جهانی را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
نام | F(U,UT,UTT,T) (1) | مقدار اولیه (U_0) (1) | مقدار اولیه (U_T0) (1/S) | شرح |
Wd | d(Wd,t)-mbd.hgj3.Qdamper | 0 | 0 | انرژی تلف شده در دمپر |
4 | قسمت Units را پیدا کنید . |
5 | در کادر محاورهای Physical Quantity ، انرژی را در قسمت متن تایپ کنید. |
6 |
7 | در درخت، General>Energy (J) را انتخاب کنید . |
8 | روی OK کلیک کنید . |
9 | در پنجره تنظیمات معادلات جهانی ، بخش واحدها را بیابید . |
10 |
11 | در کادر محاورهای Physical Quantity ، در قسمت متن، power را تایپ کنید. |
12 |
13 | در درخت، General>Power (W) را انتخاب کنید . |
14 | روی OK کلیک کنید . |
اضافه کردن مطالعه
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Study بروید . |
3 | زیربخش مطالعات را پیدا کنید . در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
4 | روی Add Study در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
مطالعه 4
مرحله 1: وابسته به زمان
1 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
2 | در قسمت متنی زمان خروجی ، range(0,0.02,5) را تایپ کنید . |
3 | قسمت Physics and Variables Selection را پیدا کنید . تیک Modify model configuration for study step را انتخاب کنید . |
4 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame>Hinge Joint 1 را انتخاب کنید . |
5 | کلیک راست کرده و Disable را انتخاب کنید . |
6 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame> Attachment 1 ، Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame> Attachment 2 و Component 1 (comp1)> را انتخاب کنید. Multibody Dynamics (mbd)، قاب فضایی را کنترل می کند > پیوست 3 . |
7 | کلیک راست کرده و Disable را انتخاب کنید . |
8 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame>Hinge Joint 2 را انتخاب کنید . |
9 | کلیک راست کرده و Disable را انتخاب کنید . |
10 | در پنجره Model Builder ، روی Study 4 کلیک کنید . |
11 | در پنجره تنظیمات برای مطالعه ، Study: Spring-Damper را در قسمت نوشتار Label تایپ کنید . |
12 | بخش تنظیمات مطالعه را پیدا کنید . تیک Generate defaults defaults را پاک کنید . |
13 | در نوار ابزار صفحه اصلی ، |
دستورالعمل ها را برای ایجاد نمودار چرخش نسبی نشان داده شده در شکل 9 دنبال کنید :
نتایج
چرخش نسبی 1
در پنجره Model Builder ، روی Relative rotation کلیک راست کرده و Duplicate را انتخاب کنید .
چرخش نسبی: فنر-دمپر
1 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، چرخش نسبی: Spring-Damper را در قسمت نوشتار Label تایپ کنید . |
برای جلوگیری از خطا در ترسیم خودکار یک متغیر، که در مجموعه داده انتخابی موجود نیست، فعلاً مجموعه داده را روی None تنظیم کنید .
2 | قسمت Data را پیدا کنید . از لیست Dataset ، None را انتخاب کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Relative rotation: Spring-Damper را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joints>Hinge Joint 3>comp1.mbd.hgj3.th – Relative rotation – rad را انتخاب کنید . |
3 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
comp1.mbd.hgj3.th | درجه | چرخش نسبی |
چرخش نسبی: فنر-دمپر
1 | در پنجره Model Builder ، روی چرخش نسبی : Spring-Damper کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، بخش Data را پیدا کنید . |
3 | از لیست Dataset ، Study: Spring-Damper/Solution 4 (sol4) را انتخاب کنید . |
4 | در نوار ابزار چرخش نسبی: Spring-Damper ، روی |
نمودار انرژی در شکل 10 را می توان با دنبال کردن مراحل زیر تولید کرد:
انرژی: فنر-دمپر
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، انرژی: فنر-دمپر را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Data را پیدا کنید . از لیست Dataset ، Study: Spring-Damper/Solution 4 (sol4) را انتخاب کنید . |
جهانی 1
1 | روی Energy: Spring-Damper کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Definitions>Variables>Wp – Potential Energy – J را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Global>mbd.Wk_tot – Total kinetic Energy – J را انتخاب کنید . |
4 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.hgj3.Wspring | جی | انرژی ذخیره شده در بهار |
Wd | جی | انرژی تلف شده در دمپر |
5 | قسمت عنوان را پیدا کنید . از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
6 | قسمت Coloring and Style را پیدا کنید . از لیست Width ، 2 را انتخاب کنید . |
7 | زیربخش نشانگرهای خط را پیدا کنید . از لیست نشانگر ، چرخه را انتخاب کنید . |
8 | از لیست موقعیت یابی ، Interpolated را انتخاب کنید . |
انرژی: فنر-دمپر
1 | در پنجره Model Builder ، روی Energy: Spring-Damper کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | کادر بررسی برچسب محور y را انتخاب کنید . در قسمت متن مربوطه، Energy (J) را تایپ کنید . |
4 | در نوار ابزار Energy: Spring-Damper ، روی |
5 | قسمت Axis را پیدا کنید . تیک گزینه Manual axis limits را انتخاب کنید . |
6 | در قسمت حداکثر متن y ، 1e6 را تایپ کنید . |
7 | در نوار ابزار Energy: Spring-Damper ، روی |
دستورالعمل های مدل سازی (حرکت تجویز شده روی مفصل)
MULTIBODY DYNAMICS (MBD)
مفصل لولا 3
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Hinge Joint 3 کلیک کنید .
حرکت تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای حرکت تجویز شده ، قسمت حرکت چرخشی تجویز شده را پیدا کنید . |
3 | از لیست حرکت تجویز شده ، سرعت زاویه ای را انتخاب کنید . |
4 | در قسمت متن ω p ، t را تایپ کنید . |
5 | از لیست شرط فعالسازی ، Conditionally active را انتخاب کنید . |
6 | در قسمت متن i θ p ، t>1 را تایپ کنید . |
اضافه کردن مطالعه
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Study بروید . |
3 | زیربخش مطالعات را پیدا کنید . در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
4 | روی Add Study در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
مطالعه 5
مرحله 1: وابسته به زمان
1 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
2 | در قسمت متن زمان خروجی ، range(0,0.02,2) را تایپ کنید . |
3 | قسمت Physics and Variables Selection را پیدا کنید . تیک Modify model configuration for study step را انتخاب کنید . |
4 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd), Controls Spatial Frame>Gravity 1 , Component 1 (comp1)> Multibody Dynamics (mbd), Controls Spatial Frame> Attachment 1 , Component 1 (comp1)>Multibody را انتخاب کنید. Dynamics (mbd)، قاب فضایی کنترل > مفصل لولا 1 ، جزء 1 (comp1)> دینامیک چند بدنه (mbd)، قاب فضایی کنترل > پیوست 2 , مؤلفه 1 (comp1)> دینامیک چند بدنه (mbd), قاب فضایی کنترل > پیوست 3 , مؤلفه 1 (comp1)> دینامیک چند بدنه (mbd), قاب فضایی کنترل > مفصل لولا 2 , مؤلفه 1 (comp1)> دینامیک چند بدنه (mbd) ، چارچوب مکانی را کنترل می کند > مفصل لولا 3 > فنر و دمپر 1 و جزء 1 (comp1)> دینامیک چند بدنه (mbd)، کنترل ها قاب فضایی >انرژی: دمپر . |
5 | کلیک راست کرده و Disable را انتخاب کنید . |
6 | در پنجره Model Builder ، روی Study 5 کلیک کنید . |
7 | در پنجره تنظیمات برای مطالعه ، Study: Prescribed motion را در قسمت نوشتار Label تایپ کنید . |
8 | بخش تنظیمات مطالعه را پیدا کنید . تیک Generate defaults defaults را پاک کنید . |
9 | در نوار ابزار صفحه اصلی ، |
برای ایجاد نمودارهای سرعت نسبی ( شکل 11 ) و چرخش نسبی ( شکل 12 ) این دستورالعمل ها را دنبال کنید:
نتایج
چرخش نسبی: حرکت تجویز شده
1 | در پنجره Model Builder ، روی Relative rotation: Spring-Damper کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، چرخش نسبی: حرکت تجویز شده را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Data را پیدا کنید . از فهرست مجموعه داده ، مطالعه: حرکت تجویز شده /راه حل 5 (sol5) را انتخاب کنید . |
4 | در نوار ابزار چرخش نسبی: حرکت تجویز شده ، روی |
سرعت نسبی: حرکت تعیین شده
1 | روی Relative rotation: Spring-Damper کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، سرعت نسبی: حرکت تجویز شده را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Data را پیدا کنید . از فهرست مجموعه داده ، مطالعه: حرکت تجویز شده /راه حل 5 (sol5) را انتخاب کنید . |
جهانی 1
1 | در پنجره Model Builder ، Relative velocity: Prescribed motion node را گسترش دهید، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint 3>mbd.hgj3.th_t – سرعت زاویه ای نسبی – rad/s را انتخاب کنید . |
3 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.hgj3.th_t | شما/ها | سرعت زاویه ای نسبی |
سرعت نسبی: حرکت تعیین شده
1 | در پنجره Model Builder ، روی سرعت نسبی : حرکت تجویز شده کلیک کنید . |
2 | در نوار ابزار Relative velocity: Prescribed motion ، روی |
دستورالعمل مدلسازی (اصطکاک روی مفصل)
MULTIBODY DYNAMICS (MBD)
مفصل لولا 3
محاسبه نیروهای مشترک برای ارزیابی نیروی نرمال در گره اصطکاک.
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Hinge Joint 3 کلیک کنید . |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت نیروهای مشترک و لحظه ها را پیدا کنید . |
3 | از لیست، محاسبه شده با استفاده از محدودیتهای ضعیف را انتخاب کنید . |
اصطکاک 1
1 | در نوار ابزار فیزیک ، روی |
2 | در پنجره تنظیمات برای اصطکاک ، قسمت اصطکاک را پیدا کنید . |
3 | در قسمت متن μ ، 0.6 را تایپ کنید . |
4 | در قسمت متن r ، 0.3 را تایپ کنید . |
برای محاسبه اتلاف انرژی در اثر اصطکاک یک ODE اضافه کنید.
انرژی: اصطکاک
1 | در پنجره Model Builder ، روی Energy: Damper کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای معادلات جهانی ، انرژی: اصطکاک را در قسمت متن برچسب تایپ کنید . |
3 | قسمت معادلات جهانی را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
نام | F(U,UT,UTT,T) (W) | مقدار اولیه (U_0) (J) | مقدار اولیه (U_T0) (W) | شرح |
Wf | d(Wf,t)-mbd.hgj3.Qاصطکاک | 0 | 0 | اتلاف انرژی در اثر اصطکاک |
اضافه کردن مطالعه
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Study بروید . |
3 | زیربخش مطالعات را پیدا کنید . در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
4 | روی Add Study در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
مطالعه 6
مرحله 1: وابسته به زمان
1 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
2 | در قسمت متن زمان خروجی ، range(0,0.05,10) را تایپ کنید . |
3 | قسمت Physics and Variables Selection را پیدا کنید . تیک Modify model configuration for study step را انتخاب کنید . |
4 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame> Attachment 1 ، Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame>Hinge Joint 1 ، Component 1 (comp1)> را انتخاب کنید. Multibody Dynamics (mbd)، کادر فضایی Controls >Atachment 2 , Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame>Atachment 3 , Component 1 (comp1)>Multibody Dynamics (mbd), Frame Spatial Controls >Hinge Joint 2 , Component 1 (comp1)>Multibody Dynamics (mbd), Frame space controls >Hinge Joint 3>Spring and Damper 1 , Component 1 (comp1) )> Multibody Dynamics (mbd)، کادر فضایی کنترل > مفصل لولا 3 > حرکت تجویز شده 1 و جزء 1 (comp1)> Multibody Dynamics (mbd)، قاب فضایی را کنترل می کند > انرژی: دمپر . |
5 | کلیک راست کرده و Disable را انتخاب کنید . |
6 | در پنجره Model Builder ، روی Study 6 کلیک کنید . |
7 | در پنجره تنظیمات برای مطالعه ، Study: Friction را در قسمت نوشتار Label تایپ کنید . |
8 | بخش تنظیمات مطالعه را پیدا کنید . تیک Generate defaults defaults را پاک کنید . |
راه حل 6 (sol6)
1 | در نوار ابزار مطالعه ، روی |
2 | در پنجره Model Builder ، گره Solution 6 (sol6) را گسترش دهید . |
3 | در پنجره Model Builder ، گره Study: Friction>Solver Configurations>Solution 6 (sol6)> Dependent Variables 1 را گسترش دهید ، سپس روی اتلاف انرژی به دلیل اصطکاک (comp1.ODE1) کلیک کنید . |
4 | در پنجره تنظیمات برای حالت ، بخش مقیاس گذاری را پیدا کنید . |
5 | از لیست روش ، دستی را انتخاب کنید . |
6 | در قسمت متن مقیاس ، 1e6 را تایپ کنید . |
7 | در نوار ابزار مطالعه ، |
برای ایجاد نمودارهای چرخش نسبی و گشتاور اصطکاکی که به ترتیب در شکل 13 و شکل 14 نشان داده شده اند، دستورالعمل های زیر را دنبال کنید :
نتایج
چرخش نسبی: اصطکاک
1 | در پنجره Model Builder ، روی Relative rotation: Spring-Damper کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، چرخش نسبی: اصطکاک را در قسمت نوشتار برچسب تایپ کنید . |
3 | قسمت Data را پیدا کنید . از لیست مجموعه داده ها ، مطالعه: اصطکاک/راه حل 6 (sol6) را انتخاب کنید . |
4 | در نوار ابزار چرخش نسبی: اصطکاک ، روی |
لحظه اصطکاک
1 | روی Relative rotation: Friction کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، لحظه اصطکاک را در قسمت نوشتار برچسب تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره لحظه اصطکاک را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، بخش y-Axis Data را پیدا کنید . |
3 | در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
mbd.hgj3.fric1.Mf | N*m | لحظه اصطکاک |
لحظه اصطکاک
1 | در پنجره Model Builder ، روی Friction moment کلیک کنید . |
2 | در نوار ابزار لحظه اصطکاک ، روی |
نمودار انرژی در شکل 15 را می توان با دنبال کردن مراحل زیر تولید کرد:
انرژی: اصطکاک
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، انرژی: اصطکاک را در قسمت متن برچسب تایپ کنید . |
3 | قسمت Data را پیدا کنید . از لیست مجموعه داده ها ، مطالعه: اصطکاک/راه حل 6 (sol6) را انتخاب کنید . |
4 | از لیست انتخاب زمان ، Interpolated را انتخاب کنید . |
5 | در قسمت متن Times (s) range(0,0.2,10) را تایپ کنید . |
جهانی 1
1 | روی Energy: Friction کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Definitions>Variables>Wp – Potential Energy – J را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Global>mbd.Wk_tot – Total kinetic Energy – J را انتخاب کنید . |
4 | قسمت y-Axis Data را پیدا کنید . در جدول تنظیمات زیر را وارد کنید: |
اصطلاح | واحد | شرح |
Wf | جی | اتلاف انرژی در اثر اصطکاک |
5 | قسمت عنوان را پیدا کنید . از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
6 | قسمت Coloring and Style را پیدا کنید . از لیست Width ، 2 را انتخاب کنید . |
7 | زیربخش نشانگرهای خط را پیدا کنید . از لیست نشانگر ، چرخه را انتخاب کنید . |
8 | از لیست موقعیت یابی ، Interpolated را انتخاب کنید . |
انرژی: اصطکاک
1 | در پنجره Model Builder ، روی Energy: Friction کلیک کنید . |
2 | در پنجره Settings for 1D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | کادر بررسی برچسب محور y را انتخاب کنید . در قسمت متن مربوطه، Energy (J) را تایپ کنید . |
4 | در نوار ابزار Energy: Friction ، روی |
5 | قسمت Axis را پیدا کنید . تیک گزینه Manual axis limits را انتخاب کنید . |
6 | در قسمت متن حداکثر y ، 3e6 را تایپ کنید . |
7 | در نوار ابزار Energy: Friction ، روی |
شما همچنین می توانید یک انیمیشن از آونگ دوتایی ایجاد کنید. مراحل زیر را برای ایجاد انیمیشن Case-1 دنبال کنید:
انیمیشن 1
1 | در نوار ابزار نتایج ، روی |
2 | در پنجره تنظیمات برای انیمیشن ، بخش Frames را پیدا کنید . |
3 | در قسمت متنی Number of frames عدد 50 را تایپ کنید . |
4 |
اکنون تحلیل ها به پایان رسیده است. اگر میخواهید این مدل را ذخیره کنید و بعداً دوباره از آن استفاده کنید، باید گرهها را در تمام مطالعاتی که در مرحله بعد اضافه میشوند غیرفعال کنید.
مطالعه: حرکت تجویز شده
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در قسمت Study: Prescribed motion روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت Physics and Variables Selection را پیدا کنید . |
3 | در درخت، Component 1 (comp1)>Multibody Dynamics (mbd)، Controls Spatial Frame>Hinge Joint 3>Friction 1 و Component 1 (comp1)>Multibody Dynamics (mbd)، Controls Spatial Frame>Energy: Friction را انتخاب کنید . |
4 | کلیک راست کرده و Disable را انتخاب کنید . |
مطالعه: فنری-دمپر
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در قسمت Study: Spring-Damper روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت Physics and Variables Selection را پیدا کنید . |
3 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd)، Frame Spatial Controls>Hinge Joint 3> Prescribed Motion 1 ، Component 1 (comp1)>Multibody Dynamics (mbd)، Controls Spatial Frame>Hinge Joint 3>Friction را انتخاب کنید. 1 و مؤلفه 1 (comp1)> دینامیک چند جسمی (mbd)، چارچوب فضایی را کنترل می کند > انرژی: اصطکاک . |
4 | کلیک راست کرده و Disable را انتخاب کنید . |
مطالعه: قفل کردن
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در قسمت Study: Locking روی مرحله 1: وابسته به زمان کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت Physics and Variables Selection را پیدا کنید . |
3 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame> Rigid Material 1 ، Component 1 (comp1)> Multibody Dynamics (mbd)، Controls Spatial Frame>Rigid Material 2 ، Component 1 (comp1) را انتخاب کنید. >Multibody Dynamics (mbd)، کادر فضایی Controls >Hinge Joint 3 ، Component 1 (comp1)>Multibody Dynamics (mbd)، کنترل های فضایی frame>Energy: Damper و Component 1 (comp1)> Multibody Dynamics (mbd)، قاب فضایی را کنترل می کند > Energy: Friction . |
4 | کلیک راست کرده و Disable را انتخاب کنید . |
مطالعه: محدودیت ها
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در قسمت Study: Constraints، روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت Physics and Variables Selection را پیدا کنید . |
3 | تیک Modify model configuration for study step را انتخاب کنید . |
4 | در درخت، Component 1 (comp1)> Multibody Dynamics (mbd)، Frame Spatial Controls>Hinge Joint 2>Locking 1 ، Component 1 (comp1)>Multibody Dynamics (mbd)، Frame Spatial Controls>Rigid Material 1 ، Component 1 را انتخاب کنید. (comp1)> Multibody Dynamics (mbd)، کادر فضایی Controls > Rigid Material 2 ، Component 1 (comp1)> Multibody Dynamics (mbd)، کنترل ها قاب فضایی > مفصل لولا 3 ، جزء 1 (comp1)> دینامیک چند بدنه (mbd)، قاب فضایی کنترل > انرژی: دمپر ، و جزء 1 (comp1)> دینامیک چند بدنه (mbd)، قاب فضایی کنترل > انرژی: اصطکاک . |
5 | کلیک راست کرده و Disable را انتخاب کنید . |
تحصیل: پایه
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در قسمت Study: Basic روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت Physics and Variables Selection را پیدا کنید . |
3 | تیک Modify model configuration for study step را انتخاب کنید . |
4 | در درخت، Component 1 (comp1)>Multibody Dynamics (mbd)، Controls Spatial Frame>Hinge Joint 1> Prescribed Motion 1 ، Component 1 (comp1)>Multibody Dynamics (mbd)، Controls Spatial Frame>Hinge Joint 2>Constraints را انتخاب کنید. 1 , مؤلفه 1 (comp1)> دینامیک چند بدنه (mbd), قاب فضایی کنترل > مفصل لولا 2> قفل 1 , مؤلفه 1 (comp1)> چند بدنه Dynamics (mbd)، قاب فضایی کنترل > مواد سفت و سخت 1 ، مؤلفه 1 (comp1) > دینامیک چند بدنه (mbd)، قاب فضایی کنترل > مواد سفت و سخت 2 ، مؤلفه 1 (comp1) > دینامیک چند بدنه (mbd)، قاب فضایی کنترل > لولا اتصال 3 ، مؤلفه 1 (comp1)> دینامیک چند بدنه (mbd)، قاب فضایی کنترل > انرژی: دمپر ، و مؤلفه 1 (comp1)> Multibody Dynamics (mbd)، قاب فضایی را کنترل می کند > انرژی: اصطکاک . |
5 | کلیک راست کرده و Disable را انتخاب کنید . |



