
مکانیزم دنده دیفرانسیل
معرفی
این مدل مکانیسم یک دنده دیفرانسیل مورد استفاده در اتومبیل ها و سایر وسایل نقلیه چرخدار را شبیه سازی می کند. این مدل با استفاده از قابلیت چرخ دنده در ماژول Multibody Dynamics در COMSOL Multiphysics ساخته شده است.
یک دیفرانسیل به چرخ محرک بیرونی اجازه می دهد تا در طول چرخش سریعتر از چرخ محرک داخلی بچرخد. این امر زمانی ضروری است که وسیله نقلیه بچرخد تا به چرخی که در امتداد خارج از منحنی پیچش حرکت می کند اجازه دهد سریعتر بچرخد و مسافت بیشتری را نسبت به چرخ داخل منحنی پیچش بپیماید. میانگین سرعت چرخش دو چرخ محرک به سادگی سرعت چرخش ورودی محور محرک است. افزایش سرعت یک چرخ با کاهش سرعت چرخ دیگر متعادل می شود.
تعریف مدل
هندسه دیفرانسیل در شکل 1 نشان داده شده است .
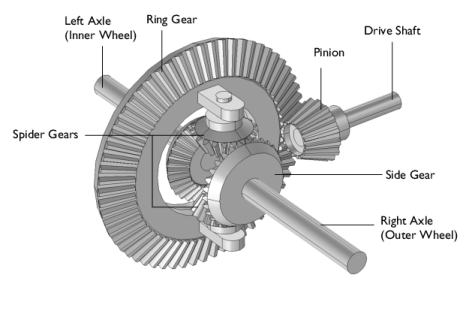
شکل 1: هندسه مکانیزم دیفرانسیل.
هندسه و اتصالات
دیفرانسیل دارای اجزای زیر است:
• | یک محور محرک با پینیون |
• | یک چرخ دنده |
• | دو چرخ دنده عنکبوتی |
• | محورهای چپ و راست با چرخ دنده های جانبی |
یک محور محرک از طریق یک پینیون به چرخ دنده حلقه متصل می شود. دو چرخ دنده عنکبوتی به گونه ای روی چرخ دنده حلقه ای نصب شده اند که می توانند آزادانه حول محور خود بچرخند. این چرخ دنده های عنکبوتی به چرخ دنده های جانبی متصل می شوند که در انتهای داخلی دو محور نصب شده اند.
قرار است چرخ هایی که مدل نیستند در انتهای بیرونی دو محور نصب شوند. در این مدل فرض بر این است که چرخ نصب شده بر روی محور سمت راست در سمت بیرونی قرار دارد در حالی که وسیله نقلیه می چرخد.
کار دیفرانسیل
دیفرانسیل وظایف زیر را انجام می دهد:
• | به محور چپ و راست اجازه می دهد تا با سرعت های مختلف بچرخند. |
• | برق را در |
• | سرعت چرخ ها را در مقایسه با محور محرک کاهش می دهد. |
در شرایط عادی، با لغزش کوچک تایر، نسبت سرعت دو چرخ محرک با عرض مسیر وسیله نقلیه (فاصله بین چرخ های محرک) و شعاع پیچ تعیین می شود.
مسیر مستقیم
وقتی وسیله نقلیه در مسیر مستقیم حرکت می کند، هر دو چرخ خودرو با سرعت یکسانی می چرخند. در این وضعیت، هر دو محور با سرعت یکسانی می چرخند در حالی که چرخ دنده های عنکبوتی یک حرکت سیاره ای را دنبال می کنند و بنابراین حول محورهای خود نمی چرخند.
مسیر منحنی
در صورت وجود یک مسیر منحنی، چرخ بیرونی باید مسافت بیشتری را طی کند. بنابراین باید سریعتر از چرخ داخلی بچرخد تا از لغزش جلوگیری شود. اگر دیفرانسیل در خودرو وجود نداشت، هر دو چرخ باید با سرعت یکسانی می چرخیدند که باعث لغزش بین چرخ ها و زمین می شد.
دیفرانسیل به دو چرخ خودرو اجازه می دهد تا با سرعت های مختلف بچرخند. در این وضعیت چرخ دنده های عنکبوتی با حرکت سیاره ای خود شروع به چرخش می کنند. چرخش چرخ دنده های عنکبوتی باعث ایجاد تفاوت در سرعت هر دو چرخ می شود.
پارامترهای مدل
• | نسبت دنده بین پینیون و چرخ دنده حلقه 4 است . |
• | نسبت دنده بین دنده عنکبوتی و دنده جانبی 1.5 است. |
• | برای جلوگیری از هر گونه لغزش در مسیر منحنی، سرعت چرخ بیرونی 6 برابر بیشتر از چرخ داخلی است . |
• | خودرو پس از یک دور چرخش محور محرک وارد یک مسیر منحنی شده و پس از سه دور چرخش محور محرک به مسیر مستقیم باز می گردد. |
محدودیت ها و بارها
• | محور محرک حول محور x با سرعت زاویه ای 200 راد بر ثانیه می چرخد. |
• | چرخ دنده حلقه حول محور y لولا شده است . |
• | چرخ دنده های جانبی (یا محورها) حول محور y لولا شده اند . |
در حالی که خودرو در حال چرخش است، یک گشتاور خارجی بر روی هر دو محور اعمال می شود. این گشتاور که نشان دهنده اصطکاک بین چرخ ها و زمین است، دو چرخ را مجبور می کند تا در نسبت سرعت مورد نظر بچرخند.
این گشتاور خارجی ( T ) باید با آن تعریف شود
(1)
جایی که
• | c f ضریب میرایی اصطکاکی است، |
• | ω o و ω i سرعت های زاویه ای چرخ های بیرونی و درونی هستند. |
• | ω r نسبت سرعت بین چرخ های بیرونی و داخلی است (در مسیر مستقیم روی 1 تنظیم می شود و در یک مسیر منحنی 6 در نظر گرفته می شود ) و |
• | ω سرعت زاویه ای محور محرک است. |
نتایج و بحث
شکل 2 بزرگی سرعت اجزای مختلف را در یک دیفرانسیل در t = 0.125 ثانیه نشان می دهد. در این زمان خودرو در مسیر مستقیم حرکت می کند. این نیز توسط مدل پیش بینی شده است زیرا هر دو محور با سرعت یکسانی می چرخند.
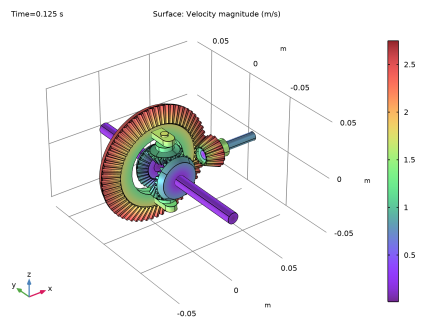
شکل 2: سرعت اجزای مختلف در یک دیفرانسیل پس از 0.125 ثانیه.
شکل 3 مولفه سرعت y قطعات دیفرانسیل مختلف را در t = 0.08 ثانیه نشان می دهد . در این زمان، وسیله نقلیه در یک مسیر منحنی حرکت می کند. این نیز توسط مدل پیشبینی میشود، زیرا چرخدندههای عنکبوتی دارای سرعت غیرصفر در امتداد محور y هستند ، که نشان میدهد علاوه بر حرکت سیارهای، آنها نیز در حال چرخش هستند. مولفه سرعت y بخش های باقیمانده صفر است زیرا همه آنها حول محور y می چرخند .
چرخش چرخ دنده های عنکبوتی در هنگام حرکت وسیله نقلیه در یک مسیر منحنی را می توان با ترسیم سرعت نسبی چرخ دنده های عنکبوتی با توجه به چرخ دنده حلقه همانطور که در شکل 4 نشان داده شده است، مشاهده کرد .
شکل 5 سرعت زاویه ای چرخ های داخلی و خارجی را برای دو حالتی که وسیله نقلیه در مسیر مستقیم و در مسیر منحنی حرکت می کند نشان می دهد. مشاهده می شود که به محض اینکه وسیله نقلیه شروع به پیچیدن می کند، سرعت چرخ بیرونی افزایش و سرعت چرخ داخلی کاهش می یابد. این اتفاق به این صورت است که میانگین ثابت نگه داشته می شود در حالی که نسبت بین دو مولفه سرعت به 6 تغییر می کند که نسبت مورد نظر برای عدم لغزش است. هنگامی که خودرو به مسیر مستقیم باز می گردد، هر دو چرخ با سرعت یکسان شروع به چرخش می کنند.
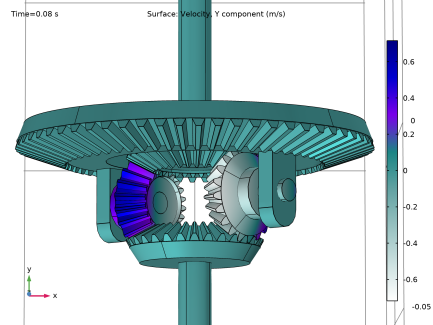
شکل 3: مولفه سرعت y در قسمت های مختلف یک دیفرانسیل پس از 0.08 ثانیه.

شکل 4: سرعت نسبی چرخ دنده های عنکبوتی نسبت به چرخ دنده حلقه در 0.08 ثانیه.
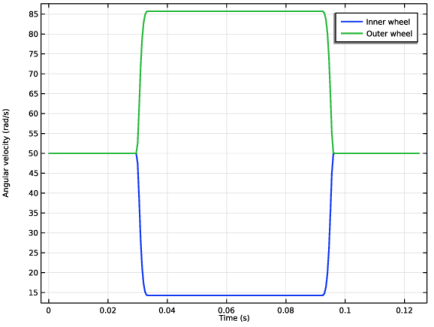
شکل 5: تغییرات زمانی سرعت زاویه ای یک چرخ داخلی و یک چرخ بیرونی.
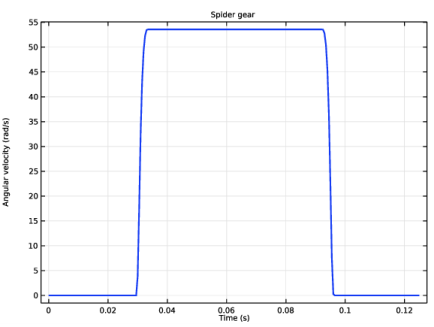
شکل 6: تغییرات زمانی سرعت چرخش چرخ دنده های عنکبوتی.
شکل 6 سرعت چرخش چرخ دنده های عنکبوتی را نشان می دهد. مشاهده می شود که به محض اینکه وسیله نقلیه شروع به پیچیدن می کند، چرخ دنده های عنکبوتی شروع به چرخش می کنند. از طریق این حرکت سرعت را از چرخ داخلی به چرخ بیرونی منتقل می کند به گونه ای که هر دو چرخ بدون لغزش می چرخند. به محض اینکه وسیله نقلیه به مسیر مستقیم برگردد چرخ دنده های عنکبوتی از چرخش باز می ایستند.
نکاتی درباره پیاده سازی COMSOL
• | برای ساخت هندسه چرخ دنده، می توانید یک قطعه چرخ دنده را از کتابخانه قطعات وارد کرده و با تغییر پارامترهای ورودی آن را سفارشی کنید. همچنین می توانید یک دیسک یا مخروط معادل برای نشان دادن چرخ دنده ایجاد کنید. |
• | همه دنده ها سفت فرض می شوند. الاستیسیته یک توری چرخ دنده را می توان در گره های Gear Pair با استفاده از زیرگره Gear Elasticity گنجاند . |
• | تمام گره های Gear Pair ایده آل و بدون اصطکاک فرض می شوند. در صورت نیاز میتوانید زیرگرههای خطای انتقال ، بکلش یا اصطکاک را اضافه کنید. |
• | برای محدود کردن حرکت چرخ دنده، میتوانید از زیرگرههای Desplacement/Rotation یا Fixed Constraint استفاده کنید. از طرف دیگر، میتوانید چرخ دندهها را از طریق گرههای مختلف مشترک روی یک شفت یا روی زمین نصب کنید . |
• | نیروی تماس در یک جفت دنده با استفاده از محدودیت های ضعیف یا روش مجازات محاسبه می شود . به طور پیش فرض، محاسبه نیروی تماس خاموش است. برای نیروهای تماس دقیق تر از روش محدودیت های ضعیف استفاده کنید. با این حال می توانید برای سیستم های بدنه سفت و سخت بزرگ به روش جریمه تغییر دهید. |
مسیر کتابخانه برنامه: Multibody_Dynamics_Module/Automotive_and_Aerospace/Differential_gear
دستورالعمل مدلسازی
از منوی File ، New را انتخاب کنید .
جدید
در پنجره جدید ، روی  Model Wizard کلیک کنید .
Model Wizard کلیک کنید .
مدل جادوگر
1 | در پنجره Model Wizard ، روی |
2 | در درخت Select Physics ، Structural Mechanics>Multibody Dynamics (mbd) را انتخاب کنید . |
3 | روی افزودن کلیک کنید . |
4 |
5 | در درخت انتخاب مطالعه ، General Studies>Time Dependent را انتخاب کنید . |
6 |
تعاریف جهانی
پارامترهای 1
1 | در پنجره Model Builder ، در قسمت Global Definitions روی Parameters 1 کلیک کنید . |
2 | در پنجره تنظیمات برای پارامترها ، بخش پارامترها را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل differential_gear_parameters.txt دوبار کلیک کنید . |
هندسه 1
واردات 1 (imp1)
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای واردات ، بخش واردات را پیدا کنید . |
3 |
4 | به پوشه Application Libraries مدل بروید و روی فایل differential_gear.mphbin دوبار کلیک کنید . |
5 |
فرم اتحادیه (فین)
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Geometry 1 روی Form Union (fin) کلیک کنید . |
2 | در پنجره تنظیمات Form Union/Assembly ، بخش Form Union/Assembly را پیدا کنید . |
3 | از لیست Action ، Form an assembly را انتخاب کنید . |
4 | تیک Create Pairs را پاک کنید . |
5 | در نوار ابزار Home ، روی |
مواد را اضافه کنید
1 | در نوار ابزار Home ، روی |
2 | به پنجره Add Material بروید . |
3 | در درخت، Built-in>Structural steel را انتخاب کنید . |
4 | روی Add to Component در نوار ابزار پنجره کلیک کنید . |
5 | در نوار ابزار Home ، روی |
MULTIBODY DYNAMICS (MBD)
یک گره Bevel Gear اضافه کنید و ویژگی های آن را مشخص کنید.
چرخ دنده اریب: پینیون
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Multibody Dynamics (mbd) کلیک راست کرده و Gears>Bevel Gear را انتخاب کنید . |
2 | در پنجره تنظیمات برای Bevel Gear ، Bevel Gear: Pinion را در قسمت نوشتار Label تایپ کنید . |
3 | فقط دامنه 6 را انتخاب کنید. |
4 | قسمت Gear Properties را پیدا کنید . در قسمت متن n ، n_pn را تایپ کنید . |
5 | در قسمت متن d p ، dp_pn را تایپ کنید . |
6 | در قسمت متن α ، آلفا را تایپ کنید . |
7 | در قسمت متن γ ، gamma_pn را تایپ کنید . |
8 | قسمت Gear Axis را پیدا کنید . بردار e g را به عنوان مشخص کنید |
-1 | ایکس |
0 | y |
0 | z |
9 | قسمت مرکز چرخش را پیدا کنید . از لیست، User defined را انتخاب کنید . |
10 | بردار X c را به صورت مشخص کنید |
dp_rg/2 | ایکس |
-dp_pn/2 | y |
0 | z |
چرخ دنده های مخروطی
به طور مشابه 5 چرخ دنده Bevel دیگر را با استفاده از اطلاعات داده شده در جدول زیر اضافه کنید:
نام | انتخاب (دامنه ها) | تعداد دندان ها | قطر گام | زاویه فشار | زاویه مخروط |
چرخ دنده مخروطی: چرخ دنده | 1 | n_rg | dp_rg | آلفا | gamma_rg |
Bevel Gear: Spider Gear 1 | 5 | n_sp | dp_sp | آلفا | gamma_sp |
Bevel Gear: Spider Gear 2 | 4 | n_sp | dp_sp | آلفا | gamma_sp |
Bevel Gear: Side Gear 1 | 3 | n_sd | dp_sd | آلفا | gamma_sd |
Bevel Gear: Side Gear 2 | 2 | n_sd | dp_sd | آلفا | gamma_sd |
چرخ دنده های مخروطی
1 | از اطلاعات محور و مرکز ارائه شده در جدول زیر استفاده کنید: |
نام | محور دنده | مرکز چرخش |
چرخ دنده مخروطی: چرخ دنده | (0,-1,0) | (0,0,0) |
Bevel Gear: Spider Gear 1 | (0,0,-1) | (0,-d_sp,dp_sd/2) |
Bevel Gear: Spider Gear 2 | (0,0,1) | (0,-d_sp,-dp_sd/2) |
Bevel Gear: Side Gear 1 | (0,-1,0) | (0,-d_sp+dp_sp/2,0) |
Bevel Gear: Side Gear 2 | (0،1،0) | (0,-d_sp-dp_sp/2,0) |
2 | در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Bevel Gear: Pinion کلیک کنید . |
جابجایی / چرخش تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای جابجایی/چرخش تجویز شده ، قسمت جابجایی تجویز شده در مرکز چرخش را پیدا کنید . |
3 | تیک Prescribed in x direction را انتخاب کنید . |
4 | کادر بررسی تجویز شده در جهت y را انتخاب کنید . |
5 | تیک Prescribed in z direction را انتخاب کنید . |
6 | بخش چرخش تجویز شده را پیدا کنید . از لیست By ، چرخش تجویز شده را انتخاب کنید . |
7 | بردار Ω را به صورت مشخص کنید |
-1 | ایکس |
0 | y |
0 | z |
8 | در قسمت متن φ 0 ، omega*t را تایپ کنید . |
چرخ دنده مخروطی: چرخ دنده
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Bevel Gear: Ring Gear کلیک کنید .
جابجایی / چرخش تجویز شده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای جابجایی/چرخش تجویز شده ، قسمت جابجایی تجویز شده در مرکز چرخش را پیدا کنید . |
3 | تیک Prescribed in x direction را انتخاب کنید . |
4 | کادر بررسی تجویز شده در جهت y را انتخاب کنید . |
5 | تیک Prescribed in z direction را انتخاب کنید . |
6 | بخش چرخش تجویز شده را پیدا کنید . از لیست By ، چرخش محدود را انتخاب کنید . |
7 | تیک گزینه Constrain rotation حول محور x را انتخاب کنید . |
8 | تیک گزینه Constrain rotation حول محور z را انتخاب کنید . |
جفت دنده 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای Gear Pair ، بخش Gear Selection را پیدا کنید . |
3 | از لیست چرخ ، Bevel Gear: Pinion را انتخاب کنید . |
4 | از لیست Pinion ، Bevel Gear: Ring Gear را انتخاب کنید . |
جفت دنده
به طور مشابه با استفاده از اطلاعات داده شده در جدول زیر، 4 جفت چرخ دنده دیگر اضافه کنید:
نام | چرخ | پینیون |
جفت دنده 2 | Bevel Gear: Spider Gear 1 | Bevel Gear: Side Gear 1 |
جفت دنده 3 | Bevel Gear: Spider Gear 1 | Bevel Gear: Side Gear 2 |
جفت دنده 4 | Bevel Gear: Spider Gear 2 | Bevel Gear: Side Gear 1 |
جفت دنده 5 | Bevel Gear: Spider Gear 2 | Bevel Gear: Side Gear 2 |
مفصل لولا 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای مفصل لولا ، قسمت انتخاب پیوست را پیدا کنید . |
3 | از فهرست منبع ، Bevel Gear: Ring Gear را انتخاب کنید . |
4 | از لیست مقصد ، Bevel Gear: Spider Gear 1 را انتخاب کنید . |
5 | قسمت Center of Joint را پیدا کنید . از لیست، Centroid موجودیت های انتخاب شده را انتخاب کنید . |
6 | از لیست سطح نهاد ، نقطه را انتخاب کنید . |
مرکز مفصل: نقطه 1
1 | در پنجره Model Builder ، گره Hinge Joint 1 را گسترش دهید ، سپس روی Center of Joint: Point 1 کلیک کنید . |
2 | در پنجره تنظیمات مرکز اتصال : نقطه ، قسمت انتخاب نقطه را پیدا کنید . |
3 |
4 | در کادر محاورهای Paste Selection ، 1528, 1531 را در قسمت متن انتخاب تایپ کنید . |
5 | روی OK کلیک کنید . |
مفصل لولا 1
1 | در پنجره Model Builder ، روی Hinge Joint 1 کلیک کنید . |
2 | در پنجره تنظیمات مربوط به مفصل لولا ، بخش Axis of Joint را پیدا کنید . |
3 | بردار e 0 را به صورت مشخص کنید |
0 | ایکس |
0 | y |
1 | z |
مفاصل لولا
به طور مشابه با استفاده از اطلاعات ارائه شده در جدول زیر، 3 مفصل لولای دیگر اضافه کنید:
نام | منبع | مقصد | مرکز مشترک (نقاط) | محور مشترک |
مفصل لولا 2 | چرخ دنده مخروطی: چرخ دنده | Bevel Gear: Spider Gear 2 | 1282، 1341 | (0,0,1) |
مفصل لولا 3 | درست شد | Bevel Gear: Side Gear 1 | 1060، 1061 | (0،1،0) |
مفصل لولا 4 | درست شد | Bevel Gear: Side Gear 2 | 748، 749 | (0،1،0) |
برای جلوگیری از لغزش در مسیر منحنی، نیروی میرایی را به هر دو چرخ دنده (یا محور) جانبی اضافه کنید.
مفصل لولا 3
در پنجره Model Builder ، روی Hinge Joint 3 کلیک کنید .
نیروی اعمالی و لحظه 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای نیروی اعمال شده و لحظه ، بخش Applied On را پیدا کنید . |
3 | از لیست، Joint را انتخاب کنید . |
4 | بخش نیروی اعمال شده و لحظه را پیدا کنید . در قسمت متن M ، cf*omega_d را تایپ کنید . |
مفصل لولا 4
در پنجره Model Builder ، در قسمت Component 1 (comp1)>Multibody Dynamics (mbd) روی Hinge Joint 4 کلیک کنید .
نیروی اعمالی و لحظه 1
1 | در نوار ابزار Physics ، روی |
2 | در پنجره تنظیمات برای نیروی اعمال شده و لحظه ، بخش Applied On را پیدا کنید . |
3 | از لیست، Joint را انتخاب کنید . |
4 | بخش نیروی اعمال شده و لحظه را پیدا کنید . در قسمت متن M ، -cf*omega_d را تایپ کنید . |
لغزش چرخ را بر حسب تفاوت سرعت زاویه ای بین چرخ بیرونی و درونی تعریف کنید.
تعاریف
متغیرهای 1
1 | در پنجره Model Builder ، گره Component 1 (comp1)>Definitions را گسترش دهید . |
2 | روی Definitions کلیک راست کرده و Variables را انتخاب کنید . |
3 | در پنجره تنظیمات برای متغیرها ، بخش متغیرها را پیدا کنید . |
4 | در جدول تنظیمات زیر را وارد کنید: |
نام | اصطلاح | واحد | شرح |
omega_i | mbd.hgj3.tht | راد/ثانیه | سرعت زاویه ای چرخ داخلی |
omega_o | mbd.hgj4.tht | راد/ثانیه | سرعت زاویه ای چرخ بیرونی |
omega_r | 1+5*rect1 (امگا*t) | نسبت سرعت چرخ بیرونی و داخلی | |
omega_d | omega_o-omega_r*omega_i | تفاوت سرعت چرخ بیرونی و داخلی |
مستطیل 1 (راست1)
1 | در نوار ابزار Home ، روی |
2 | در پنجره تنظیمات برای Rectangle ، بخش Parameters را پیدا کنید . |
3 | در قسمت متنی محدودیت پایین ، 2*pi را تایپ کنید . |
4 | در قسمت متنی حد بالا ، 6*pi را تایپ کنید . |
5 | برای گسترش بخش Smoothing کلیک کنید . در قسمت متنی Size of transition zone ، pi/4 را تایپ کنید . |
مش 1
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Mesh 1 کلیک کنید . |
2 | در پنجره تنظیمات مش ، قسمت Physics-Controlled Mesh را پیدا کنید . |
3 | از فهرست اندازه عنصر ، Finer را انتخاب کنید . |
4 |
مطالعه 1
مرحله 1: وابسته به زمان
1 | در پنجره Model Builder ، در بخش مطالعه 1 ، روی Step 1: Time Dependent کلیک کنید . |
2 | در پنجره تنظیمات مربوط به زمان وابسته ، قسمت تنظیمات مطالعه را پیدا کنید . |
3 | در فیلد متنی Output times ، range(0,5e-4,0.125) را تایپ کنید . |
4 | در نوار ابزار صفحه اصلی ، |
نتایج
از دستورالعمل های زیر برای رسم سرعت چرخ دنده های مختلف در دیفرانسیل همانطور که در شکل 2 نشان داده شده است استفاده کنید .
سرعت: بزرگی
1 | روی Displacement (mbd) کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح سه بعدی ، Velocity: Magnitude را در قسمت نوشتار Label تایپ کنید . |
سطح
1 | در پنجره Model Builder ، گره Velocity: Magnitude را گسترش دهید ، سپس روی Surface کلیک کنید . |
2 | در پنجره تنظیمات برای Surface ، بخش Expression را پیدا کنید . |
3 | در قسمت متن Expression ، mbd.vel را تایپ کنید . |
4 | در نوار ابزار Velocity: Magnitude ، روی |
5 |
همانطور که در شکل 3 نشان داده شده است، از دستورالعمل های زیر برای ترسیم چرخش چرخ دنده های عنکبوتی حول محور خود استفاده کنید .
مطالعه 1 / راه حل 1 (2) (sol1)
1 | در پنجره Model Builder ، گره Results>Datasets را گسترش دهید . |
2 | روی Results>Datasets>Study 1/Solution 1 (sol1) کلیک راست کرده و Duplicate را انتخاب کنید . |
انتخاب
1 | در نوار ابزار نتایج ، روی |
2 | در پنجره تنظیمات برای انتخاب ، قسمت انتخاب موجودیت هندسی را پیدا کنید . |
3 | از لیست سطح نهاد هندسی ، دامنه را انتخاب کنید . |
4 | فقط دامنه های 1-5 را انتخاب کنید. |
سرعت: جزء Y
1 | در پنجره Model Builder ، روی Velocity: Magnitude کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح سه بعدی ، Velocity: Y Component را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت Data را پیدا کنید . از لیست مجموعه داده ، مطالعه 1/راه حل 1 (2) (sol1) را انتخاب کنید . |
4 | از لیست زمان (ها) ، 0.08 را انتخاب کنید . |
5 | قسمت Plot Settings را پیدا کنید . از لیست View ، View 2 را انتخاب کنید . |
سطح
1 | در پنجره Model Builder ، گره Velocity: Y Component را گسترش دهید ، سپس روی Surface کلیک کنید . |
2 | در پنجره تنظیمات برای Surface ، بخش Expression را پیدا کنید . |
3 | در قسمت متن Expression ، mbd.u_tY را تایپ کنید . |
4 | قسمت Coloring and Style را پیدا کنید . |
5 | در کادر محاوره ای جدول رنگ ، Aurora>AuroraAustralis را در درخت انتخاب کنید. |
6 | روی OK کلیک کنید . |
7 | در نوار ابزار Velocity: Y Component ، روی |
برای تجسم حرکت چرخ دنده های عنکبوتی نسبت به چرخ دنده حلقه، می توانید از گزینه تعریف یک چارچوب مرجع موجود در رابط Multibody Dynamics استفاده کنید و متغیرهای پس پردازش را برای جابجایی و سرعت با توجه به چارچوب مرجع رسم کنید.
MULTIBODY DYNAMICS (MBD)
1 | در پنجره Model Builder ، در قسمت Component 1 (comp1) روی Multibody Dynamics (mbd) کلیک کنید . |
2 | در پنجره تنظیمات برای Multibody Dynamics ، برای گسترش بخش Results کلیک کنید . |
3 | از لیست قاب مرجع تعیین بدنه ، Bevel Gear: Ring Gear را انتخاب کنید . |
میتوانید راهحل را برای رسم متغیرهای پس پردازش موجود برای چارچوب مرجع جدید بهروزرسانی کنید.
مطالعه 1
در نوار ابزار مطالعه ، روی Update Solution کلیک کنید .
نتایج
مطالعه 1 / راه حل 1 (3) (sol1)
در پنجره Model Builder ، در Results>Datasets روی Study 1/Solution 1 (2) (sol1) کلیک راست کرده و Duplicate را انتخاب کنید .
انتخاب
1 | در پنجره Model Builder ، گره Study 1/Solution 1 (3) (sol1) را گسترش دهید ، سپس روی Selection کلیک کنید . |
2 | در پنجره تنظیمات برای انتخاب ، قسمت انتخاب موجودیت هندسی را پیدا کنید . |
3 | در لیست، 2 و 3 را انتخاب کنید . |
4 |
5 | فقط دامنه های 1، 4 و 5 را انتخاب کنید. |
سرعت: مرجع چرخ دنده
1 | در پنجره Model Builder ، روی Displacement (mbd) کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره Model Builder ، روی Displacement (mbd) 1 کلیک کنید . |
3 | در پنجره تنظیمات برای گروه طرح سه بعدی ، Velocity: Ring Gear Reference را در قسمت نوشتاری Label تایپ کنید . |
4 | قسمت Data را پیدا کنید . از فهرست مجموعه داده ، مطالعه 1/راه حل 1 (3) (sol1) را انتخاب کنید . |
5 | از لیست زمان (ها) ، 0.08 را انتخاب کنید . |
6 | قسمت Plot Settings را پیدا کنید . کادر بررسی لبه های مجموعه داده Plot را پاک کنید . |
سطح
1 | در پنجره Model Builder ، روی Surface کلیک کنید . |
2 | در پنجره تنظیمات برای Surface ، بخش Expression را پیدا کنید . |
3 | در قسمت متن Expression ، mbd.vel_ref را تایپ کنید . |
تغییر شکل
1 | در پنجره Model Builder ، گره Surface را گسترش دهید ، سپس روی Deformation کلیک کنید . |
2 | در پنجره تنظیمات برای تغییر شکل ، بخش Expression را پیدا کنید . |
3 | در قسمت متن X جزء ، u_ref را تایپ کنید . |
4 | در قسمت متنی جزء Y ، v_ref را تایپ کنید . |
5 | در قسمت متنی کامپوننت Z ، w_ref را تایپ کنید . |
سرعت: مرجع چرخ دنده
1 | در پنجره Model Builder ، در قسمت Results روی Velocity: Ring Gear Reference کلیک کنید . |
2 | در پنجره Settings for 3D Plot Group ، قسمت Plot Settings را پیدا کنید . |
3 | از لیست View ، نمای جدید را انتخاب کنید . |
4 |
5 | در نوار ابزار Velocity: Ring Gear Reference ، روی |
مشاهده سه بعدی 3
1 | در پنجره Model Builder ، گره Results>Views را گسترش دهید ، سپس روی View 3D 3 کلیک کنید . |
2 | در پنجره تنظیمات برای View 3D ، بخش View را پیدا کنید . |
3 | تیک گزینه Lock camera را انتخاب کنید . |
برای رسم سرعت زاویه ای هر دو چرخ و چرخ دنده های عنکبوتی که به ترتیب در شکل 5 و شکل 6 نشان داده شده اند، دستورالعمل های زیر را دنبال کنید .
سرعت زاویه ای: چرخ
1 | در نوار ابزار صفحه اصلی ، روی |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، سرعت زاویهای: چرخها را در قسمت نوشتار برچسب تایپ کنید . |
جهانی 1
1 | روی Angular Velocity: Wheels کلیک راست کرده و Global را انتخاب کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint 3>mbd.hgj3.th_t – سرعت زاویه ای نسبی – rad/s را انتخاب کنید . |
3 | روی Add Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint 4>mbd.hgj4.th_t – سرعت زاویه ای نسبی – rad/s را انتخاب کنید . |
4 | برای گسترش بخش Coloring and Style کلیک کنید . از لیست Width ، 2 را انتخاب کنید . |
5 | برای گسترش بخش Legends کلیک کنید . از فهرست Legends ، Manual را انتخاب کنید . |
6 | در جدول تنظیمات زیر را وارد کنید: |
افسانه ها |
چرخ داخلی |
چرخ بیرونی |
سرعت زاویه ای: چرخ
1 | در پنجره Model Builder ، روی Angular Velocity: Wheels کلیک کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، برای گسترش بخش عنوان کلیک کنید . |
3 | از لیست نوع عنوان ، هیچکدام را انتخاب کنید . |
4 | قسمت Plot Settings را پیدا کنید . |
5 | کادر بررسی برچسب محور y را انتخاب کنید . در فیلد نوشتاری مرتبط، Angular velocity (rad/s) را تایپ کنید . |
6 | در نوار ابزار Angular Velocity: Wheels ، روی |
7 |
Angular Velocity: Spider Gear
1 | روی Angular Velocity: Wheels کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات برای گروه طرح 1 بعدی ، Angular Velocity: Spider Gear را در قسمت نوشتار Label تایپ کنید . |
3 | قسمت عنوان را پیدا کنید . از لیست نوع عنوان ، دستی را انتخاب کنید . |
4 | در قسمت متن عنوان ، Spider gear را تایپ کنید . |
جهانی 1
1 | در پنجره Model Builder ، گره Angular Velocity: Spider Gear را گسترش دهید ، سپس روی Global 1 کلیک کنید . |
2 | در پنجره تنظیمات برای جهانی ، روی Replace Expression در گوشه سمت راست بالای بخش y-Axis Data کلیک کنید . از منو، Component 1 (comp1)>Multibody Dynamics>Hinge Joint>Hinge Joint 1>mbd.hgj1.th_t – سرعت زاویه ای نسبی – rad/s را انتخاب کنید . |
3 | قسمت Legends را پیدا کنید . تیک Show legends را پاک کنید . |
4 | در نوار ابزار Angular Velocity: Spider Gear ، روی |
5 |
انیمیشن 1
1 | در نوار ابزار نتایج ، روی |
2 | در پنجره تنظیمات انیمیشن ، بخش صحنه را پیدا کنید . |
3 | از لیست موضوع ، سرعت: قدر را انتخاب کنید . |
4 | قسمت Frames را پیدا کنید . در قسمت متنی Number of frames عدد 100 را تایپ کنید . |
انیمیشن 2
1 | روی انیمیشن 1 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات انیمیشن ، بخش صحنه را پیدا کنید . |
3 | از لیست موضوع ، Velocity: Y Component را انتخاب کنید . |
انیمیشن 3
1 | روی Animation 2 کلیک راست کرده و Duplicate را انتخاب کنید . |
2 | در پنجره تنظیمات انیمیشن ، بخش صحنه را پیدا کنید . |
3 | از لیست موضوع ، سرعت: مرجع دنده حلقه را انتخاب کنید . |



